
Design of Rehabilitation Training Device for Finger-Tapping Movement Based on Trajectory Extraction Experiment
2023-09-22 14:29:04LIUZhihui劉志輝KONGFanlei孔繁磊WANGTingting王婷婷
關(guān)鍵詞:王婷婷
LIU Zhihui(劉志輝), KONG Fanlei(孔繁磊), WANG Tingting(王婷婷)
College of Mechanical Engineering, Donghua University, Shanghai 201620, China
Abstract:Patients with stroke, tendon injury and cardiovascular disease commonly have the sequelae of hand dysfunction which seriously affects the patients’ ability in daily life. Previous studies have found that the function of finger-tapping movement accounts for 80% of the hand function, and the recovery of the motor ability of the finger-tapping can greatly improve the patients’ self-care ability. Therefore, a rehabilitation training device to restore the finger-tapping movement is designed. In the study, anthropometry was applied to measure the dynamic and static dimensions of human hands in the finger-tapping movement. Subjects were selected according to the selected size range, and an experimental platform was built. Sampling points were set at key positions of index fingers and thumbs, and characteristic points of coronal planes and sagittal planes were recorded at a frequency of 10 frames per second. MATLAB was used to optimize the fitting of the scatter plot, and the fitted spatial curve parameters were input into the modeling software to establish the joint motion trajectory model and assist the design of rehabilitation training devices. It is proved that the device is ergonomic, and can effectively achieve the finger-tapping movement rehabilitation training of patients.
Key words:movement therapy; finger-tapping movement; anthropometry; stroke; ergonomics
0 Introduction
The structure of the human hand is complex, and its motor function is also easily damaged. The main causes of hand dysfunction are stroke[1], tendon injury[2]and some cardiovascular diseases. According to data from the World Health Organization, more than 15 million people worldwide are affected by stroke and cardiovascular and cerebrovascular diseases every year, and most of these patients have sequelae accompanied by hand dysfunction. Systematic rehabilitation training has an important impact on the recovery of limb function. The training can not only reduce swelling, adhesion and muscle atrophy, but also promote the healing of damaged tissues, so as to relieve pain, avoid joint re-injury, sensory re-education and the reconstruction of limb sensory function, so that the injured hand has a better recovery.
At present, the mainstream hand rehabilitation medical treatment is exercise therapy[3], including proprioceptive neuromuscular facilitation[4], motor relearning therapy[5]and constraint-induced movement therapy[6]. In China, the training for these three types of rehabilitation therapy is assisted by rehabilitation physicians, and the rehabilitation process is dependent on professional rehabilitation physicians. Since the development of the rehabilitation medical treatment in our country is in its initial stage, the current proportion of rehabilitation physicians in the basic population in our country is about 0.4∶100 000[7], and the number of professional rehabilitation physicians is in short supply. In traditional targeted hand-to-hand therapy, physicians are labor-intensive and the cost of treatment is high, resulting in a very limited number of patients served by physicians per unit time. However, rehabilitation training and rehabilitation care are still indispensable for the recovery of hand function after treatment[8]. Before the rehabilitation training, patients need doctors to determine the course of the disease on the affected side through a professional muscle strength test scale so as to customize the training method, and the “hand-in-hand” auxiliary training is mechanical repetition. Therefore, it is a better solution to design a rehabilitation medical device to replace the manual operation.
Finger-tapping movement is a type of human hand movement control, mainly involving the thumb and index finger. The thumb function accounts for 50% of the entire hand function, and the finger-tapping movement between the thumb and the index finger accounts for 80% of the entire finger movements[9], so the finger-tapping movement is of great significance to the realization of normal hand grasping function. In the process of finger movement, the changes of each movement unit are independent of each other, and the corresponding changes occur together as a whole. The control theory of motor synergism[10]states that the fingers are inaccurate in the process of movement and can be changed through acquired training. For example, babies have no control when they first grasp things, while adults are relatively skilled and easy to learn grasping control.
In the existing research, rehabilitation training devices that achieve major rehabilitation functions by controlling specific finger movements can be mainly divided into two types. One type of training devices is based on fine control by increasing the degree of freedom of the exoskeleton mechanism of the hand, or using a software robot to improve the human-machine compatibility of the device, so that it can complete the specified actions through the control program, such as the soft robot bilateral hand rehabilitation system designed by Haghshenas-Jaryanietal.[11]for fine motor learning, and the 10 degree-of-freedom (DOF) hand rehabilitation exoskeleton device designed by Zhongetal.[12]The mechanical complexity of these devices is high, and the control of driving force and DOF also requires high precision, and the cost is relatively high. The other type is based on the finger movement characteristics of the finger-tapping or grasping movement, and the motion trajectory parameters are obtained before the motion fitting of the mechanism is carried out, for example, the rehabilitation training devices for finger-tapping movement researched by Yuetal.[9]The device adopts a finger-end traction mechanism to assist its passive movement, although the motions trajectory of the finger-end is well fitted, the motion plane adopts two planes that are perpendicular to each other, and the actual motion plane of the finger-tapping movement is not considered. To sum up, the current research on the finger-tapping movement and the corresponding rehabilitation training devices is still insufficient. Therefore, according to the dynamic and static dimensions of the human hand in the finger-tapping movement, the trajectory extraction experiment of the index finger and thumb was designed, aiming to restore the motion trajectory of the normal human hand as much as possible. Then a rehabilitation training equipment that could imitate real hand motion was designed based on the results.
1 Trajectory Extraction Experiment of Finger-Tapping Movement
In patients with sequelae of hand dysfunction, the clinical manifestations are usually motor disability, including flexion incapacitation, extension incapacitation, and joint ankylosis incapacitation[13]which lead to the inability of patients to flexibly control the joint movement of fingers, and the possibility of motor injuries of joint hyperextension. Therefore, the key to the later stage of hand function rehabilitation is to improve the range of motion of the joints and the disability status through rehabilitation training on the basis of the patients’ existing exercise ability. In the training, patients cannot autonomously complete fine movements, such as finger-tapping movement and palmar opposition movement, which requires the help of doctors or external equipment to control the movement of hand joints, so that they can carry out the movement training in accordance with the law of hand movement[14]under the premise of avoiding sports injuries. The purpose of the trajectory extraction experiment is to provide the device with a finger motion guidance device that is safe and conforms to the normal hand motion law, so as to better guide the patients to complete the rehabilitation training.
1.1 Analysis of static standard dimensions in finger-tapping movement
The joints involved in finger-tapping movement are metacarpophalangeal joint of thumb(T-MP), interphalangeal joint of thumb(T-PIP), metacarpo-phalangeal joint of index finger(IF-MP), proximal interphalangeal joint of index finger(IF-PIP), distal interphalangeal joint of index finger(IF-DIP) and carpometacarpal joints(CMC), as shown in Fig.1. In the current research on finger-tapping movement training and trajectory extraction, the sampling point markers collected by researchers are located at the fingertips. The active and passive movements of the second and the third phalanx are often overlooked when designing the mechanism of the index finger[15]. The index finger movement mechanism is usually designed to have 2-3 DOF, that is, the flexion-extension movement of IF-MP, the flexion-extension movement of IF-PIP and adduction-abduction movement of IF-MP.
According to “GB/T16252—1996 Hand sizing system-Adult”[16], the fingers are classified. It can be seen from Figs. 2 and 3 that the statistical distribution of the coverage rate of the hand length and width of adults in the country conforms to the normal distribution law. Among them, the peak of adult male hand length is concentrated in the range of 178-188 mm, and the peak of male hand width is concentrated in the range of 78-83 mm; the peak of adult female hand length is concentrated in the range of 165-175 mm, and the peak of female hand width is concentrated in the range of 72-77 mm. From the data in Figs. 2 and 3, the hand size coverage of the people near the peak is the highest. That is, it meets the needs of the largest proportion of users.
Before the normal finger-tapping movement trajectory of adults, it is necessary to determine the standard size. The first purpose is to facilitate the selection of experimental objects and the completion of subsequent experiments, and the second purpose is to determine the positional relationship between the finger rotation center and the track. Some standard sizes were determined. That is, the male hand lengthXM1is 185 mm, and the male hand widthXM2is 80 mm; the female hand lengthXF1is 175 mm, and the female hand widthXF2is 75 mm. There is a regression equation for the conversion between the size of the hand control part of the male or female and the two groups of data of the hand length and the hand width.

Fig.1 Names of the joints and bones in the finger-tapping movement

Fig.2 Adult hand length coverage

Fig.3 Adult hand width coverage
In this experiment, three control parts, index finger length, thumb length and thenar width, can be used. The position and calculation formula of the control parts were shown in Fig. 4. The superscript “M” represents the male data, and the superscript “F” represents the female data.

Fig.4 Formula for calculating the size of control parts
The regression equation for index finger length is
(1)
The regression equation for thumb length is
(2)
The regression equation of thenar width is
(3)
After calculation, the standard index finger length is thatYM1=69.45 mm for the male andYF1=66.25 mm for the female. The standard thumb length is thatYM2=54.24 mm for the female andYF2=53.21 mm for the female. The standard size thenar width is thatYM3=57.84 mm for the male andYF3=54.71 mm for the female.
The distance from the index finger rotation center to the tip of the index fingerLis
(4)
The rotation center of the thumb is approximately at the thenar, and there is a conversion relationship between the thumb fingertip and the rotation center
(5)
And by calculating we can getLM1=86.81 mm,LF1=82.75 mm;LM2=136.04 mm,LF2=130.58 mm.
1.2 Analysis of dynamic size in finger-tapping movement
The control components involved in the finger-tapping movement of the human hand are the cooperation of the index finger, the thumb and the wrist. The main joints involved in the finger-tapping movement of the index finger are IF-MP and IF-PIP. The DOF of flexion-extension movement is equal to 1 for IF-MP and 1 for IF-PIP; IF-DIP movement and its DOF are ignored in this experiment. The joints of the thumb that are mainly involved in the finger-tapping movement are the T-MP, T-PIP, and CMC. The DOF of flexion-extension movement is equal to 1 for T-MP and 1 for T-PIP; The DOF of CMC is equal to 2 for adduction-abduction exercise in the coronal axis direction and flexion-extension exercise in the sagittal axis direction[17]. Table 1 shows the angular range and the maximum torque of each joint motion[12].

Table 1 Angle range and maximum torque of each joint motion
1.3 Design of experimental scheme for trajectory extraction
In order to enable the device in this study to carry out reasonable rehabilitation training under the premise of safety, the motion trajectory of the device must conform to the true trajectory of normal finger-tapping movement. Therefore, based on anthropometry and dynamic size of the hand, an experiment was designed to extract the trajectory of the finger-tapping movement so as to obtain the finger-tapping movement trajectory that meets the needs of rehabilitation training.
In this experiment, the camera was used to take pictures of the hand continuously, and the frequency was set to 10 frames per second. That is, the time interval between two adjacent images is 0.1 s. The specific experimental steps are designed as follows.
Step1With reference to the calculation results of the human hand shape mentioned above, the male index finger length is namedYM1and the female index finger length is namedYF1, as well as the male thumb length isYM2and the female thumb length isYF2. According to these two sets of data, a subject between the standard size of male and female was selected to perform the right hand finger-tapping movement, and the movement process was filmed. The subject was a 25-year-old male with a static hand size of 68 mm for the index finger and 53 mm for the thumb.
Step2Two sampling points were marked on the subject’s right hand, which were located at the distal interphalangeal joint on the outside of the index finger, and at the interphalangeal joint on the upper side of the thumb (that is, the side of the joint close to the thumb-index web).
Step3In order to facilitate later image recognition and processing, a marker was set at each sampling point, that is, a white column fixed to the body surface with the cross-section radiusR=1 mm and the heightH=2 mm. And the specific form of the sampling point was shown in Fig. 5.
Step4After confirming that the subject’s hands, wrists, and forearms were bare and that there were no objects interfering with the knuckles, wrists, and elbows, the subject’s palms were down, and the wrist and palm were placed on the wrist brace. The angles of the two supporting surfaces of the wrist brace were slowly adjusted, so that the wrist brace was only subjected to the weight of the wrist and palm, namely the wrist was completely relaxed. The palm and wrist bones were immobilized with nylon straps.
Step5The setup of the experimental platform was shown in Fig.6. One camera was set up in the coronal and sagittal directions of the platform, and the frequency was adjusted to the same. Adjust the focal length so that the hand was clearly imaged; adjust the height of the camera, and aligned the focus horizontally with the center of rotation of the index finger.

Fig.5 Initial position of hand and wrist as well as the sampling point

Fig.6 Setup of experimental platform
Step6The hand and wrist were adjusted to the initial position. That is, five fingers were straight, the thumb was naturally open, and the thumb and index finger were at an angle of 60° from the index finger. The initial positions of the hand and wrist are schematically shown in Fig.5. Simultaneously with the finger-tapping movement, two cameras began to record images. The hands were moved at a constant speed 8-10 s for a reciprocation. It is better to squeeze the pulp of the index finger and the thumb (not the fingertip) slightly. The limit position of the fingers is the same as the initial position. After completing two sets of reciprocating finger-tapping movements, the camera stopped recording.
Step7The subjects repeated Step 6 three times, and the smoothest reciprocating motion was taken as the original data.
In the experimental design, some motion parameters are standardized, the purpose is to make the experiment repeatable, and by reasonably controlling the variables in the motion process, the experimental results are scientific, and the motion process can be more realistically restored. Among them, the normalized parameters are as follows.
(i) The frequency of image recording is 10 frames per second, and the time from the initial position of two fingers to the contact of the finger pulp is controlled at about 4.0 s. That is, 40 data points are optimally recorded during the half motion. The time required for the half-way grasping movement of a normal human hand is within 2.5 s[18], and the purpose of controlling the time to 4.0 s is to take the difficulty of the patients’ movement into account, which will prolong the time, and the integer scatter data is also convenient for follow-up data processing.
(ii) From the perspective of the coronal plane, the angle between the index finger and the thumb in the initial position is about 60°, and the upper part of the fourth finger and the upper part of the metacarpal are on the same line.
(iii) Two sampling points are set at the interphalangeal joints of the index finger and thumb, not near the fingertips of the two fingers, in order to improve the safety of the device. The sampling point is used as the driving point in the construction of rehabilitation device. If it is set at the fingertip of the index finger, the index finger can be equivalent to a multi-link mechanism with DOF equal to 3 in passive motion, which greatly increases the risk of the turning back the two interphalangeal joints and causes sports injuries. Therefore, in order to avoid risks, the setting of sampling points in related studies was adjusted to reduce the DOF of the equivalent mechanism of the index finger, which improved the controllability of passive exercise training.
2 Finger-Tapping Movement Data Processing and MATLAB Fitting
2.1 Feature point data extraction
The raw data recorded on the coronal and sagittal plane were imported into Photoshop, each set of data contained 40 images, and the processed images were shown in Fig. 7. Adjust the opacity and layer blend mode of each image to get a combined image showing 40 marker points in the same two images. From the marked point in the image of the starting position, every five marked points was a group. There were eight groups, marked as “groups 1-8”, and the center position of the marker point was marked with the symbol “+”.
From the initial position, the 1st and 4th marker points in the 5 images of group 1 were extracted as feature points, and a new blank image was created to save the feature points. Groups 2-8 are also extracted according to the above rules, and finally 16 feature points were obtained on the coronal plane and sagittal plane respectively, and the scatter diagrams of the feature points were shown in Figs. 8 and 9. The scatter coordinates of the index finger and thumb were all based on the rotation center of the index finger to establish a coordinate system, in which thex-axis of the coordinate system was the coronal axis set in the experimental platform, they-axis is the sagittal axis, and thez-axis was the vertical axis.
The scatterplot coordinates of the feature points on the sagittal plane (y-zplane) were shown in Fig.8.The scatterplot coordinates of the feature points on the coronal plane (x-zplane) were shown in Fig. 9.

Fig.8 Scatter plot of characteristic points on sagittal plane (unit:mm)

Fig.9 Scatter plot of characteristic points on coronal plane(unit:mm)
Index finger sagittal plane (y-z) scatter matrixL11is

(6)
Thumb sagittal plane (y-z) scatter matrixL12is

(7)
Index finger coronal plane (x-z) scatter matrixL21is

(8)
Thumb coronal plane (x-z) scatter matrixL22is

(9)
2.2 MATLAB fitting process of two-dimensional trajectory projection curves
The obtained scatter matrix was divided into two groups of data according to the index finger and thumb, and then imported into MATLAB software, respectively.
Figure 10 showed the polynomial fitting curve generated by the index finger on the coronal plane and sagittal plane according to the scatter plot of feature points. The two curves indicated the projection shapes of the movement trajectory of the index finger on the two surfaces during the finger-tapping movement. The sagittal plane adopted the fitting method of quadratic polynomial (poly2), and the coronal plane adopted the fitting method of the first-order polynomial (poly1).
Figure 11 showed the polynomial fitting curve generated by the thumb on the coronal plane and sagittal plane according to the scatter plot of feature points. The two curves indicated the projection shapes of the motion trajectories on the two surfaces of the thumb during the finger-tapping movement. The sagittal plane adopted the fitting method of quadratic polynomial (poly2), and the coronal plane adopted the fitting method of the first-order polynomial (poly1).
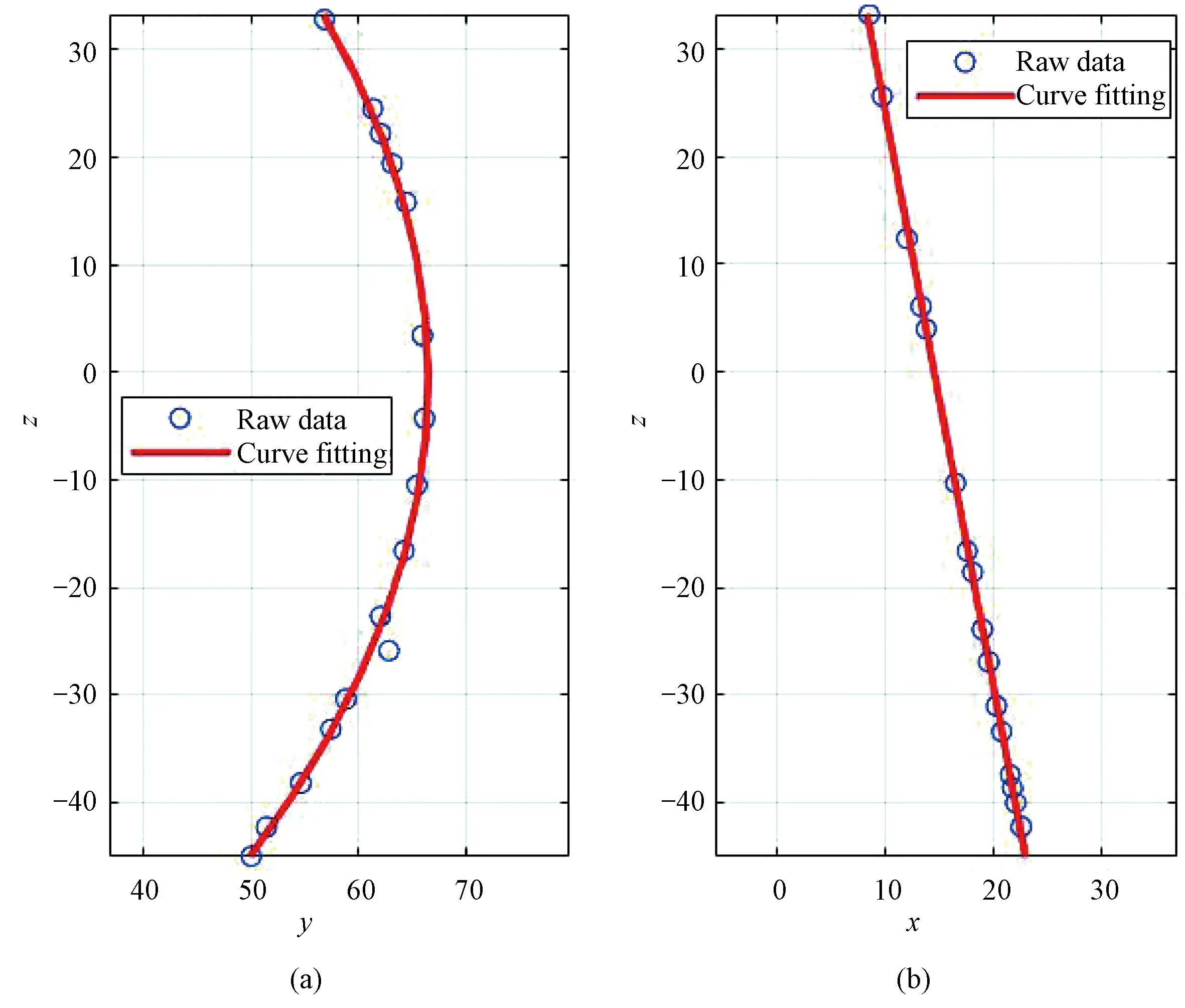
Fig.10 Scatter plot of index finger feature points on two surfaces:(a) index finger sagittal curve; (b) index finger coronal curve
2.3 MATLAB fitting process of three-dimensional trajectory spatial curve
At present, most passive motion training devices use the mechanism to simulate normal hand motion. Such a simulation mechanism can only minimize the error value to the allowable range of the design accuracy, and the design accuracy itself lacks an academically recognized standard value. However, this study was result-oriented, and the motion mechanism of the device was reversely estimated after obtaining the motion trajectory of the normal human hand. Compared with the mechanism motion results obtained by the forward design path, the mechanism based on the fitting curve design was more approximate to the real value, and could also avoid secondary motion damage to a certain extent.
The two-dimensional trajectory projection curves of index finger and thumb were obtained above, and then the three-dimensional trajectory spatial curves could be calculated by the least squares fitting method. The method is a mathematical optimization method that can find the best function matching of the data by minimizing the sum of the squares of the errors, so as to find the optimal curve that conforms to the empirical formula[19].
Hand in hand, we strolled by the stores. People smiled and nodded. Lots of smiling and nodding, in fact. I never realized there were so many friendly people as we have seen this evening, dear, I observed.
Figure 12 showed the fitting spatial curve results for the index finger. According to the data analysis, due to the difference in the value range ofzbetween the two surfaces,z11∈[-42.2, 33.2] on the coronal plane andz12∈[-45.0, 32.8] on the sagittal plane, it was necessary to unify the value range ofzin MATLAB. Let the new value range bez1, and take the extreme value ofz11andz12as its value range.
Substitute the curve equation of the projection curve of the index finger into the space coordinate system, and specify the value range ofzi. That is, the equation of space curveLiof the index finger was
(10)

Fig.12 Fitting spatial curve of index finger
Likewise, Fig. 13 showed the fitting spatial curve results for the thumb. Unify the value range ofzin MATLAB, set the new value range asz2, and take the extreme value ofz21andz22as its value range.
Substitute the curve equation of the projection curve of the thumb into the space coordinate system, and specify the value range ofzt. That is, the equation of spatial curveLtof the thumb was
(11)
Figure 14 showed the relative positional relationship of the opposing finger-tapping movement trajectories of the index finger and the thumb. The red and cyan curves in the figure were the fitting spatial curves of the motion trajectories of the index finger and thumb, respectively. The spatial positions of the two curves respectively represented the movement trajectory of the IF-DIP of the index finger and the joint convex point of the thumb IF-PIP near the thumb-index web, relative to the MCP of the index finger.

Fig.14 Relative position relationship between index finger and thumb movement trajectory
2.4 Parametric establishment of orbit model
The trajectory curve parameters generated in MATLAB were imported into the model software, and the motion trajectory of the finger was established with the two curves as guide lines. The modeling software used in this study was Rhino, and the established orbit model was shown in Fig. 15. The track model was composed of two parts:the index finger track and the thumb track, which respectively guided the index finger and the thumb to open and close on the lower side thereof. In order to facilitate the installation of the torque gear set, a chute with a width of 15 mm was provided inside the track. In the model software, the proximal ends of the two rails were smoothly connected to form a whole. The joints provided support points for the rails, and the brackets were connected to the base.

Fig.15 Orbit model built by parameterization
3 Institutional Design
The size of the wrist rest design is determined according to the “GB10000—1988 Human dimensions of Chinese adults”[20]. The structure design of the palm support part fits the physiological structure of the palm as much as possible without affecting the freedom of movement of the thumb and index finger joints, so that the structure is ergonomic. The supporting surface of the thumb side avoids the thumb muscles (abductor pollicis brevis, flexor pollicis brevis, Metacarpal muscle of thumb,etc.); the supporting surface on the front side close to the four fingers is cut off at the position of the transverse beam of the palm. That is, the index finger is moved backwards about 5 mm to the rotation center; the support surface on the side of the little finger is based on the anatomical structure of the hand, and the curved surface design fits the short flexor of the little finger to increase the comfort here. Nylon straps are used to secure the forearm at the proximal wrist of the forearm support member. The two support parts are connected with the bracket by hinges, and the angle of the parts can be adjusted independently according to the user’s arm length and hand length. The training person’s hand is fixed on the wrist support, and the index finger and thumb can reach the maximum joint motion required for rehabilitation. Figure 16 was a structural design model of the ergonomic wrist rest.

Fig.16 Structural design model of ergonomic wrist rest
The finger-tapping exercise rehabilitation training mechanism designed in this study can realize both active and passive rehabilitation training. Figure 17 was a three-dimensional model of the support of the constructed finger-tapping exercise rehabilitation training device.

Fig.17 Rehabilitation training device of the finger-tapping exercise
The active rehabilitation module adopts a gear set mechanism with damping springs. During the flexion and retraction of the index finger and thumb, the springs provide external damping for patients to perform resistance training; during the return phase of the extension and opening of the two fingers, the springs can also provide external assistance to help patients to return to the initial posture for the next round of movements, so as to cope with the problem of “bending but not extending” in most patients.
The passive rehabilitation module was a group of rocker-slider mechanisms with DOF equal to 3 driven by a micro motor, and then the end of the rocker drived the two fingers for opening-closing movement, so as to achieve its movement function.
4 Conclusions
Aiming to realize the finger-tapping movement training of index finger and thumb for stroke rehabilitation patients, a set of finger-tapping movement rehabilitation training device was designed and developed. The research applied a combined method based on anthropometry and ergonomics to design a normal human hand motion trajectory extraction experiment, standardized the motion parameters to make the experiment repeatable, and controlled the variables to make the experimental results scientific. The experimental platform added data recording in the direction of the sagittal axis, thereby establishing a trajectory parameter equation with a higher degree of reduction. With the help of the parameter equation of the spatial curve, the training equipment for finger-tapping movement was established, which met the needs of rehabilitation training for patients and provided new ideas for the design and development of hand function rehabilitation equipment.
猜你喜歡
Chinese Physics B(2022年12期)2022-12-28 09:55:12
小說月報(bào)(2022年9期)2022-10-28 10:40:17
Chinese Physics B(2022年10期)2022-10-26 09:54:44
Chinese Physics B(2022年5期)2022-05-16 07:12:02
意林彩版(2022年2期)2022-05-03 10:23:56
心理學(xué)報(bào)(2022年4期)2022-04-12 06:32:04
——繪本《一場(chǎng)觀眾最多的故事會(huì)》親子游戲活動(dòng)
娃娃樂園·繪本(2021年11期)2021-12-01 13:26:40
意林(兒童繪本)(2020年3期)2020-04-03 05:47:02
Journal of Acupuncture and Tuina Science(2020年1期)2020-02-28 08:46:10
閱讀(快樂英語高年級(jí))(2017年5期)2017-05-30 10:48:04
 Journal of Donghua University(English Edition)2023年4期
Journal of Donghua University(English Edition)2023年4期
- Journal of Donghua University(English Edition)的其它文章
- TSCL-SQL:Two-Stage Curriculum Learning Framework for Text-to-SQL
- Unifying Convolution and Transformer Decoder for Textile Fiber Identification
- Optimization of Insulin Rapid Amyloid Fibrosis Conditions
- Data-Centric Approach to Digital Twin Modeling of Production Lines
- College Basic Development Status Data Management System Based on Data Governance Framework
- Complex Dynamics Analysis of Generalized Tullock Contest