
哈密頓量誘導(dǎo)的量子演化速度*
2023-12-01 02:43:04董珊珊秦立國劉福窯龔黎華黃接輝
物理學(xué)報(bào) 2023年22期
董珊珊 秦立國 劉福窯 龔黎華 黃接輝?
1) (上海工程技術(shù)大學(xué)數(shù)理與統(tǒng)計(jì)學(xué)院,上海 201620)
2) (上海工程技術(shù)大學(xué)電子與電氣學(xué)院,上海 201620)
在研究量子態(tài)的演化問題時(shí),量子演化速率往往定義為量子初態(tài)與其演化態(tài)之間的態(tài)距離隨時(shí)間的變化率.本文將量子演化的基本理論與線性代數(shù)方法相結(jié)合,通過量子態(tài)演化的路徑距離來研究量子系統(tǒng)的演化.量子幺正演化系統(tǒng)中,量子演化算符包含了量子演化的路徑信息,路徑距離的大小則決定于演化算符本征值的幅角主值分布.由量子態(tài)演化的路徑距離隨時(shí)間的變化率而得到的量子瞬時(shí)演化速率則正比于系統(tǒng)哈密頓量的最大與最小本征值之差.作為應(yīng)用之一,利用量子演化的路徑距離及哈密頓量誘導(dǎo)的瞬時(shí)演化速率,可以給出量子演化新的時(shí)間下限.此時(shí)間下限只與系統(tǒng)的演化算符及哈密頓量有關(guān),而與量子初態(tài)的具體形式無關(guān),這與量子系統(tǒng)真實(shí)演化時(shí)間所具有的性質(zhì)一致.嚴(yán)格的理論證明以及兩個(gè)演化實(shí)例的數(shù)值結(jié)果均表明,在 [0,π/(2ωH)] 時(shí)間范圍內(nèi),本文給出的演化時(shí)間下限與真實(shí)演化時(shí)間重合,是真實(shí)演化時(shí)間的準(zhǔn)確預(yù)測(cè).通過量子演化的路徑距離及相應(yīng)演化速率來研究量子系統(tǒng)的演化,為相關(guān)問題的解答提供了新的思路和方法.
1 引言
量子態(tài)的演化速度是量子理論中的基本問題[1–3].隨著量子信息科學(xué)在近二三十年的蓬勃發(fā)展,量子態(tài)的演化速度再次引起物理學(xué)工作者的高度重視,因?yàn)樗P(guān)系到量子計(jì)算的算力[4,5]、量子信息轉(zhuǎn)換率[6–8]、量子測(cè)量的測(cè)量精度[9–11]以及量子電池的充電量[12,13]等.在研究量子系統(tǒng)的演化問題時(shí),量子演化速度往往定義為量子初態(tài)與其演化態(tài)之間的“距離”隨時(shí)間的變化率,這使得量子演化速度的計(jì)算不但與量子系統(tǒng)的哈密頓量有關(guān),還與量子系統(tǒng)所處的狀態(tài)有關(guān).但可以從另外一個(gè)角度來看量子態(tài)的演化問題.量子系統(tǒng)的演化遵循薛定諤方程為簡單起見,接下來設(shè)定 ?=1 .若不考慮系統(tǒng)耗散,則系統(tǒng)初態(tài) |ψ0〉可以通過一個(gè)幺正算符Ut與其t時(shí)刻的演化態(tài) |ψt〉關(guān)聯(lián): |ψt〉=Ut|ψ0〉,而這個(gè)幺正算符完全由系統(tǒng)的哈密頓量及演化時(shí)間t決定:其中,T為時(shí)序算符,其依據(jù)時(shí)段先后對(duì)哈密頓量所對(duì)應(yīng)的演化算符進(jìn)行排序,先作用的哈密頓量所對(duì)應(yīng)的演化算符排在幺正演化算符連乘形式的右側(cè).這意味著,非耗散量子系統(tǒng)中,量子態(tài)的演化規(guī)律包含在幺正算符Ut中,不同量子初態(tài)可以看作量子系統(tǒng)演化的不同初始條件.如果能提取幺正算符Ut中所包含的“路徑”信息,那么這個(gè)路徑所包含的演化距離,以下簡稱為路徑距離,隨時(shí)間的變化率可以用來定義量子演化的瞬時(shí)速率.不難推斷,通過這個(gè)方式定義的量子演化速率取決于量子系統(tǒng)的哈密頓量,而與系統(tǒng)所處的量子態(tài)無關(guān),這個(gè)性質(zhì)與經(jīng)典物理學(xué)中質(zhì)點(diǎn)運(yùn)動(dòng)的瞬時(shí)速率是一致的.在經(jīng)典物理學(xué)中,一個(gè)質(zhì)點(diǎn)的運(yùn)動(dòng)狀態(tài)滿足牛頓第二運(yùn)動(dòng)定律:F=ma.只要給定質(zhì)點(diǎn)運(yùn)動(dòng)的初始狀態(tài),則其所受外力完全決定質(zhì)點(diǎn)此后的運(yùn)動(dòng)狀態(tài),包括其速度和位置等.其中,質(zhì)點(diǎn)運(yùn)動(dòng)的瞬時(shí)速度定義為位移矢量隨時(shí)間的變化率.相應(yīng)地,質(zhì)點(diǎn)運(yùn)動(dòng)的瞬時(shí)速率等于路程隨時(shí)間的變化率,本質(zhì)上,其大小取決于質(zhì)點(diǎn)的初速度及其所受合外力,而與質(zhì)點(diǎn)所處的位置無關(guān).
基于量子系統(tǒng)的演化算符,本文定義了量子態(tài)演化的路徑距離,此路徑距離僅取決于演化算符本征值的輻角主值.可以證明,量子演化的路徑距離是所有量子初態(tài)與其量子演化態(tài)之間距離的上限.演化算符本征值的輻角主值分布隨時(shí)間的變化決定了量子演化的瞬時(shí)速率,其值正好等于系統(tǒng)哈密頓量最大與最小本征值差值的一半.作為應(yīng)用之一,給出了量子系統(tǒng)真實(shí)演化時(shí)間的又一個(gè)下限,文中的理論證明及實(shí)例均表明,此時(shí)間下限在一個(gè)特定范圍內(nèi),與真實(shí)演化時(shí)間完全重合,是對(duì)量子系統(tǒng)真實(shí)演化時(shí)間的精準(zhǔn)預(yù)測(cè).
2 量子演化算符包含的路徑距離
在經(jīng)典物理的運(yùn)動(dòng)學(xué)中,如果一個(gè)質(zhì)點(diǎn)一直沿某個(gè)方向作直線運(yùn)動(dòng),那么它所經(jīng)歷的路程等于質(zhì)點(diǎn)始末位置的距離,除此之外,質(zhì)點(diǎn)所經(jīng)歷的路程都大于質(zhì)點(diǎn)始末位置的距離.以此為借鑒,定義量子演化算符Ut所包含的路徑距離,使其不小于通過Ut關(guān)聯(lián)起來的所有量子態(tài)對(duì){ρ0,ρt}之間的態(tài)距離:
式中,Tr|·| 表示矩陣本征值的絕對(duì)值之和.而一個(gè)矩陣A的本征值的絕對(duì)值等于矩陣AA?或A?A本征值的算術(shù)平方根,這意味著,一個(gè)矩陣左乘或者右乘任意幺正矩陣都不會(huì)改變其本征值的絕對(duì)值.注意到V及Ut?均為幺正矩陣,故(2)式可改寫為
眾所周知,兩個(gè)量子態(tài)間的保真度在幺正變換下是保持不變的.我們總可以選擇合適的幺正變換,使得量子初態(tài)ρ0的本征態(tài)過渡到演化算符Ut的本征態(tài)上面的Uhlmann 保真度過渡為
接下來根據(jù)演化算符Ut本征值的輻角主值{?j}的分布,來確定上面的Uhlmann 保真度的最小值.毫無疑問,如果鎖定{?j}中絕對(duì)值最大的相位,比如?M≡max{|?j|},并忽略(4) 式中求和結(jié)果中的虛部,那很容易可得到Uhlmann 保真度的一個(gè)下限:
通過以上方式得到的Uhlmann 保真度下限 cos(?M) 并不能保證其緊湊性.注意到
其中,?0可以為任意位相常量,則{|?j-?0|}的最大值可以用來計(jì)算?M.同時(shí),為了保證所得到的Uhlmann 保真度下限的緊湊性,我們又必須選取合適的?0,使得?M盡量小,所以?M定義為
為了讓相關(guān)討論更直觀,我們把輻角主值{?j}的分布在一個(gè)極坐標(biāo)系的單位圓中表示出來.N維量子系統(tǒng)中,量子演化算符Ut有N個(gè)本征值,其輻角主值與單位圓中N條半徑的極角相對(duì)應(yīng),此單位圓的圓心取為極坐標(biāo)系的極點(diǎn).
現(xiàn)在我們通過以下4 步來找出(6)式中的目標(biāo)?0及相應(yīng)的?M.
1) 在以上單位圓與輻角主值{?j}相對(duì)應(yīng)的N條半徑中,找出相鄰且夾角最大的兩條半徑.如果輻角主值{?j}按升序排列,那相鄰兩條半徑之間的夾角為
在圖1 中,夾角最大的兩條半徑為OC和OD,這兩條半徑對(duì)應(yīng)的輻角主值為?3和?4.

圖1 在極坐標(biāo)系的單位圓中,不同半徑的極角與演化算符本征值的輻角主值相對(duì)應(yīng).具有最大夾角的兩相鄰半徑,其夾角平分線的反向延長線的極角即為 ?0 取值,而 ?M 則為此反向延長線與前述兩相鄰半徑的夾角.?M 也有如下等效理解: 演化算符本征值的每個(gè)輻角主值與一個(gè)半徑對(duì)應(yīng),找到能覆蓋所有半徑的最小扇形,此最小扇形的圓心角的一半即為目標(biāo) ?M 值Fig.1.In the polar coordinate system,the polar angle of a radius in the unit circle corresponds to the principal argument of an eigenvalue of the evolution operator.The angular bisector of two neighboring radii,which form the largest included angle among all neighboring radii,is the reverse extension line of the radius with polar angle ?0 ,and?M is equal to half the largest included angle among all neighboring radii.Equivalently speaking,the principal argument of each eigenvalue of the evolution operator corresponds to a radius in the unit circle.If we find out the smallest sector in this unit circle to cover all radii mentioned above,?M is then equal to half the sector angle.
2) 若{Dj}中的第k個(gè)為最大值,即Dk=max{Dj},將其所對(duì)應(yīng)的兩條半徑的極角標(biāo)記為?+和?-,則:
3){Dj}中值最大的那個(gè)夾角的角平分線的反向延長線的極角即對(duì)應(yīng)方程(6)中目標(biāo)位相?0(見圖1 中的半徑OP),即其中“±” 二選其一,使得?0限定在 (-π,π] 范圍內(nèi).
4)?0與?+和?-所對(duì)應(yīng)半徑間的夾角相同,這個(gè)夾角大小就是方程(6)中?M值,
通過這個(gè)方式得到的?M值有如下直觀解釋: 在以上單位圓中畫一個(gè)能覆蓋輻角主值{?j}所對(duì)應(yīng)N條半徑的扇形,那么滿足這個(gè)條件的最小扇形的圓心角的一半即為方程(6)中?M值.這個(gè)最小扇形的對(duì)稱軸對(duì)應(yīng)方程(6)中的?0位相.
基于此?M而得到 的Uhlmann 保真度下限,F(ρ0,ρt)≥cos(?M),相比F(ρ0,ρt)≥cos(max{?j})顯然更緊湊,因?yàn)椴坏仁?M≤max{|?j|}始終成立.保真度的反余弦值,即Bures 角度,可以用來度量兩個(gè)量子態(tài)之間的態(tài)距離.因此把?M作為量子演化算符Ut所包含的路徑距離:
既然 cos(?M) 是Uhlmann 保真度的下限,可以得出如下結(jié)論: 量子演化算符Ut所包含的路徑距離不小于通過其連接起來的任意量子態(tài)對(duì)之間的Bures 角.通俗點(diǎn)講,就是量子態(tài)與其演化態(tài)之間的距離不大于演化過程中的路徑距離.這與經(jīng)典物理中,一個(gè)質(zhì)點(diǎn)運(yùn)動(dòng)軌跡上任意兩點(diǎn)之間的距離不大于這兩點(diǎn)之間路程的結(jié)論相一致.
3 哈密頓量誘導(dǎo)的瞬時(shí)演化速率
基于以上對(duì)量子演化算符Ut所包含的路徑距離的定義,來計(jì)算量子系統(tǒng)演化時(shí)的瞬時(shí)速率.在一個(gè)不含時(shí)非耗散量子系統(tǒng)中,量子系統(tǒng)從t時(shí)刻演化到 (t+dt) 時(shí)刻( dt→0) 所對(duì)應(yīng)的演化算符為Udt=exp(-idt) .不含時(shí)哈密頓量的本征值為實(shí)數(shù),本文采用D{λ}表示哈密頓量最大本征值與最小本征值的差值,D{λ}≡λmax-λmin.不難得出,當(dāng) dt→0 時(shí),演化算符為Udt的本征值的輻角主值即 為哈密頓量本征值的 (-dt) 倍,并且均為小量.所以這些輻角主值中,相鄰輻角主值夾角的最大值為:max{Dj}=2π-dt(λmax-λmin)=2π-D{λ}dt.根據(jù)(10)式,演化算符Udt所包含的路徑距離為由此可得到量子系統(tǒng)在哈密頓量作用下的瞬時(shí)演化速率:
其中,λmax和λmin分別為哈密頓量的最大和最小本征值.由此可得出結(jié)論: 不含時(shí)哈密度量誘導(dǎo)的瞬時(shí)演化速率僅取決于哈密頓最大與最小本征值的差值.
如果以量子初態(tài)為基準(zhǔn),則量子系統(tǒng)的演化態(tài)與此量子初態(tài)之間的路徑距離隨時(shí)間的變化率必然以上面得到的瞬時(shí)演化速率為上限.因此,在一個(gè)不含時(shí)量子系統(tǒng)中,量子系統(tǒng)從初態(tài)演化到目標(biāo)態(tài)所需的時(shí)間有一個(gè)下限:
早在20 世紀(jì)上半葉,Mandelstam 和Tamm[1]研究了一個(gè)量子純態(tài)自由演化到與其正交的量子態(tài)所需的最短時(shí)間,τMT=π/(2ΔE) ,ΔE是量子系統(tǒng)的能量帶寬.這個(gè)結(jié)論說明,若以量子態(tài)之間的態(tài)距離為距離量度,量子系統(tǒng)的能量帶寬與量子態(tài)演化速率直接相關(guān).相關(guān)研究很快被推廣到一般情形,當(dāng)目標(biāo)態(tài)與初態(tài)不正交時(shí),在這兩個(gè)量子態(tài)之間自由演化的Mandelstam-Tamm 時(shí)間下限是[19,20]:
4 舉例和討論
根據(jù)這些信息,不難得到t時(shí)刻的演化態(tài)與初態(tài)之間的態(tài)距離,即Bures 角為
進(jìn)而可用(13)式來估算從初態(tài)到t時(shí)刻演化態(tài)之間的Mandelstam-Tamm 時(shí)間下限τMT.同 時(shí),在演化時(shí)間t∈[0,π/(2ωH)] 范圍內(nèi),由(10) 式可以給出演化算符Ut所包含的路徑距離:d(Ut)=而由(11)式得到的哈密頓量所誘導(dǎo)的演化速率為所以,在演化時(shí)間t∈[0,π/(2ωH)] 范圍內(nèi),采用(12)式能準(zhǔn)確預(yù)測(cè)量子系統(tǒng)的真實(shí)演化時(shí)間:τH=t,這一結(jié)論與上面討論的二維純態(tài)情形相同.值得關(guān)注的是,這一結(jié)論不依賴于量子初態(tài)中cj參數(shù)的選擇.實(shí)際上,可以把此結(jié)論推廣到一般情形: 在幺正演化系統(tǒng)中,基于哈密頓量誘導(dǎo)的量子演化速率ωH而得到的演化時(shí)間下限τH,在∈[0,π/(2ωH)] 范圍內(nèi),其預(yù)測(cè)值與系統(tǒng)真實(shí)演化時(shí)間完全相等.
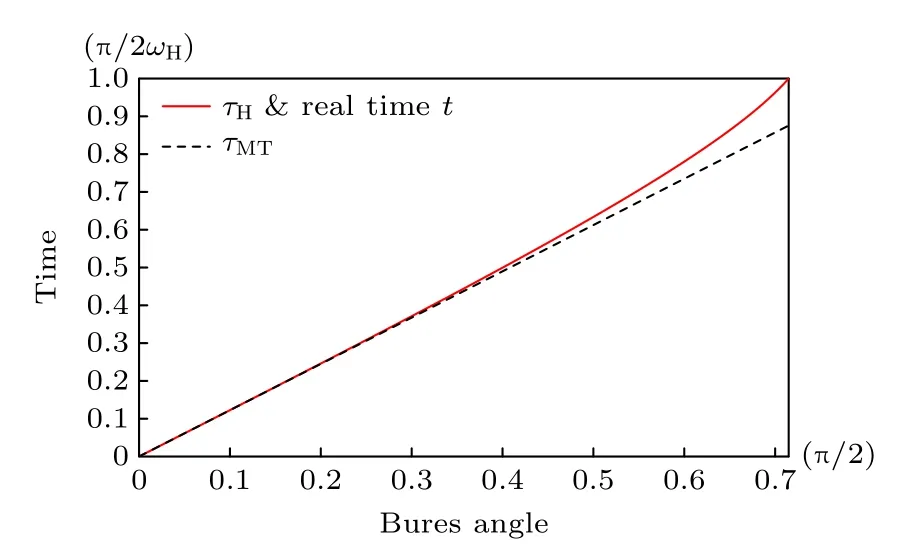
圖2 三能級(jí)量子純態(tài) |ψ0〉 在t ∈ 時(shí)間范圍內(nèi)的自由演化過程中,本文提出的演化時(shí)間下限τH始終與真實(shí)演化時(shí)間t重合,見紅色實(shí)線.而Mandelstam-Tamm 時(shí)間下限位于真實(shí)演化時(shí)間曲線的下方,見黑色短劃線Fig.2.During the evolution of a qutrit prepared in a pure state |ψ0〉,the lower bound of the evolution time proposed here meets the real evolution time perfectly in the range t ∈.The curve of the Mandelstam-Tamm bound is below the curve of the real evolution time,see the black dashed line.
本文提出的演化時(shí)間下限τH只依賴于系統(tǒng)的演化算符及哈密頓量誘導(dǎo)的演化速率,而與量子初態(tài)無關(guān),這個(gè)性質(zhì)也是其與Mandelstam-Tamm時(shí)間下限的又一重要區(qū)別.現(xiàn)在研究以上例子中的量子純態(tài)和一個(gè)量子混合態(tài)其中在相同哈密頓量=Diag(1 2 4) 作用下的演化速率,并把本文提出的時(shí)間下限τH與Mandelstam-Tamm 時(shí)間下限作對(duì)比.在圖3 中以真實(shí)的演化時(shí)間t為橫坐標(biāo),畫出了以上純態(tài)和混合態(tài)演化特例中時(shí)間下限τH與Mandelstam-Tamm 時(shí)間下限的變化曲線.可以看到,無論系統(tǒng)的初態(tài)是純態(tài)還是混合態(tài),只要系統(tǒng)的哈密頓量相同,那么系統(tǒng)的演化速度就相同,在t∈[0,π/(2ωH)] 演化時(shí)間范圍內(nèi),本文提出的演化時(shí)間下限τH與真實(shí)的演化時(shí)間t完全重合,這一結(jié)論對(duì)純態(tài)和混合態(tài)的演化都成立.而無論是量子純態(tài) |ψ0〉,還是混合態(tài)ρ0的演化,若用Mandelstam-Tamm 下限來估算量子系統(tǒng)的真實(shí)演化時(shí)間,其值都比真實(shí)值小.相比較而言,量子混合態(tài)ρ0的演化過程中,Mandelstam-Tamm 下限與真實(shí)時(shí)間的誤差比量子純態(tài)的演化過程中的誤差大,這與文獻(xiàn)[21,22]得到的結(jié)論相一致.
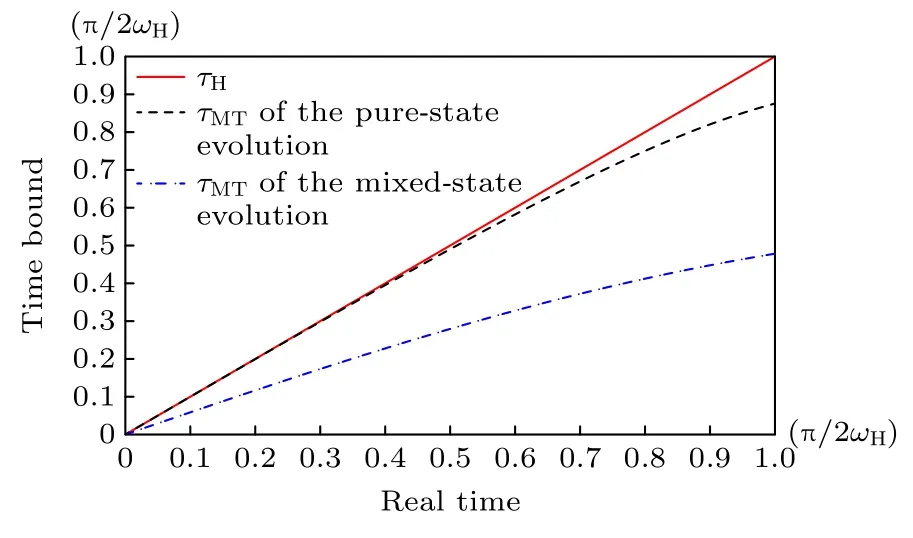
圖3 在相同的哈密頓量作用下,三能級(jí)量子純態(tài) |ψ0〉 和混合態(tài) ρ0 在演化 過程中,依據(jù)本 文提出 的時(shí)間下限 τH 在[0,π/(2ωH)]范圍內(nèi)與真實(shí)演化時(shí)間相等,見紅色實(shí)線.量子純態(tài) |ψ0〉 演化過程中的Mandelstam-Tamm 時(shí)間下限小于真實(shí)演化時(shí)間,見黑色短劃線.對(duì)混合態(tài) ρ0 的演化而言,其Mandelstam-Tamm 時(shí)間下限與真實(shí)演化時(shí)間的偏差最大,見藍(lán)色點(diǎn)線Fig.3.During the evolution of a qutrit prepared in a pure state |ψ0〉 and in a mixed state ρ0,governed by the same Hamiltonian,the lower bound of the evolution time proposed here meets the real evolution time perfectly in the range t ∈[0,π/(2ωH)],see the black dashed line.In the evolution of the mixed state ρ0,the Mandelstam-Tamm bound is deviated from the real evolution time substantially,see the blue dotted line.
5 結(jié)論
量子態(tài)的演化速度關(guān)系到很多量子信息處理過程的速度,是量子信息相關(guān)領(lǐng)域的重要課題,正吸引越來越多的關(guān)注[23–30].在以往的研究中,量子系統(tǒng)的演化速度往往定義為量子初態(tài)與其量子演化態(tài)之間的態(tài)距離隨時(shí)間的變化率.實(shí)際上,量子態(tài)在幺正系統(tǒng)中的演化過程完全體現(xiàn)在其演化算符中,量子系統(tǒng)演化的距離可以通過演化算符來量化.從量子基本原理出發(fā),采用線性代數(shù)的方法定義了量子幺正系統(tǒng)的路徑距離,發(fā)現(xiàn)其只與演化算符的本征值的輻角主值分布有關(guān).換句話說,量子系統(tǒng)的路徑距離只取決于系統(tǒng)的哈密頓量及演化時(shí)間,而與量子態(tài)的具體形式無關(guān).這一性質(zhì)與不同量子態(tài)在相同哈密頓量作用下的演化特性吻合:在相同哈密頓量相同時(shí)間的作用下,不同量子態(tài)經(jīng)歷相同的演化算符作用,可視為經(jīng)歷了相同的演化“路徑”,但不同量子初態(tài)與其量子演化態(tài)之間的態(tài)距離是不一樣的.
基于以上的演化路徑距離,量子系統(tǒng)的瞬時(shí)演化速率ωH可定義為瞬時(shí)路徑距離對(duì)時(shí)間的變化率,其值正好等于哈密頓量最大與最小本征值之差的一半.哈密頓量誘導(dǎo)的瞬時(shí)演化速率表示量子系統(tǒng)演化的快慢,從而決定了量子系統(tǒng)從一個(gè)量子態(tài)到一個(gè)目標(biāo)態(tài)之間的演化時(shí)間.如果量子系統(tǒng)以哈密頓量誘導(dǎo)的瞬時(shí)演化速率ωH沿測(cè)地線向某目標(biāo)態(tài)演化,則量子初態(tài)與目標(biāo)態(tài)之間的路徑距離與瞬時(shí)演化速率的比值為真實(shí)演化時(shí)間的一個(gè)下限.本文在理論上證明:在[0,π/(2ωH)] 演化時(shí)間內(nèi),以上演化時(shí)間下限與真實(shí)演化時(shí)間完美重合,是真實(shí)演化時(shí)間的精準(zhǔn)預(yù)測(cè).而廣泛應(yīng)用的Mandelstam-Tamm 時(shí)間下限只有在二維特殊純態(tài)情況下才與真實(shí)演化時(shí)間重合.采用二維量子比特系統(tǒng)及三維qutrit 系統(tǒng)中量子純態(tài)和量子混合態(tài)的演化實(shí)例對(duì)相關(guān)結(jié)論進(jìn)行了驗(yàn)證.通過量子演化的路徑距離及相應(yīng)演化速率來研究量子系統(tǒng)的演化,為相關(guān)問題的解答提供了新的思路和方法.
猜你喜歡
物理學(xué)報(bào)(2024年4期)2024-03-19 00:42:46
青少年科技博覽(中學(xué)版)(2023年3期)2023-05-11 07:36:58
科技風(fēng)(2022年31期)2022-11-23 01:44:40
小學(xué)科學(xué)(學(xué)生版)(2020年1期)2020-01-19 06:02:08
湖北大學(xué)學(xué)報(bào)(自然科學(xué)版)(2020年1期)2020-01-07 06:18:14
科學(xué)大眾(中學(xué))(2019年2期)2019-04-08 02:26:40
教育教學(xué)論壇(2018年42期)2018-10-13 09:34:40
西安工程大學(xué)學(xué)報(bào)(2016年6期)2017-01-15 14:08:28
阜陽師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2016年1期)2016-10-13 01:50:50
