基于分布式有限感知網(wǎng)絡(luò)的多伯努利目標(biāo)跟蹤
2022-06-18 10:37:46吳孫勇李天成孫希延蔡如華
自動(dòng)化學(xué)報(bào) 2022年5期
吳孫勇 王 力 李天成 孫希延 蔡如華
分布式傳感器網(wǎng)絡(luò)[1?3]是由許多在空間上分布的,相互連接的傳感器組成,且每個(gè)傳感器在監(jiān)測(cè)范圍內(nèi)有獨(dú)立的檢測(cè)能力和獨(dú)立的計(jì)算能力.相比于集中式多傳感器[4],分布式傳感器網(wǎng)絡(luò)具有可擴(kuò)展性強(qiáng),環(huán)境適應(yīng)能力強(qiáng),通信成本低,抗局部節(jié)點(diǎn)故障能力強(qiáng)等優(yōu)點(diǎn).因此,分布式傳感器網(wǎng)絡(luò)已經(jīng)被廣泛的應(yīng)用于多目標(biāo)跟蹤,導(dǎo)航,工業(yè)監(jiān)控,容錯(cuò)控制等領(lǐng)域.一般而言,利用分布式傳感器網(wǎng)絡(luò)進(jìn)行多目標(biāo)跟蹤包含兩個(gè)組成部分,即多目標(biāo)濾波過(guò)程和相鄰傳感器之間的信息通信融合,如何設(shè)計(jì)合理有效的濾波融合方案是其關(guān)鍵.
Mahler 和Vo 等在隨機(jī)有限集(Random finite set,RFS)理論的基礎(chǔ)上提出了一系列多目標(biāo)跟蹤濾波器[5],例如概率假設(shè)密度[6](Probability hypothesis density,PHD)濾波器,勢(shì)概率假設(shè)[7](Cardinalized PHD,CPHD)濾波器,多伯努利[8?9](Multi-target multi-Bernoulli,MeMBer)濾波器等.與PHD 濾波器和CPHD 濾波器傳遞后驗(yàn)分布的一階矩和勢(shì)分布不同,MeMBer 濾波器將每個(gè)目標(biāo)建模為伯努利RFS,然后直接遞歸傳遞服從多伯努利分布的基于軌跡的近似后驗(yàn)多目標(biāo)密度參數(shù),且在一段時(shí)間內(nèi)維持多個(gè)伯努利分量,每個(gè)伯努利分量都對(duì)應(yīng)一個(gè)潛在的軌跡,使得MeMBer 濾波器的性能更優(yōu),并且已經(jīng)被成功運(yùn)用到許多實(shí)際問(wèn)題中.隨機(jī)有限集理論與方法的不斷發(fā)展和完善也極大促進(jìn)了分布式多目標(biāo)跟蹤研究.特別是,基于分布式傳感器網(wǎng)絡(luò)實(shí)現(xiàn)的MeMBer 濾波器展現(xiàn)了優(yōu)越性能[10?12].
分布式傳感器網(wǎng)絡(luò)協(xié)同濾波的關(guān)鍵在于相鄰傳感器之間的通信融合,合理的通信融合方法能有效地提高目標(biāo)跟蹤性能.目前,基于信息平均共識(shí)[13]的融合方法針對(duì)未知關(guān)聯(lián)的分布式傳感器網(wǎng)絡(luò)表現(xiàn)出了魯棒性和穩(wěn)健性,主要的平均共識(shí)融合方法有算術(shù)平均(Arithmetic average,AA)融合和幾何平均(Geometric average,GA)融合方法[14].其中,基于廣義協(xié)方差交叉[15?17](Generalized covariance intersection,GCI)的MeMBer 融合就是一種GA 融合方法,又稱為指數(shù)混合密度(Exponential mixture density,EMD) 方法,該方法使得融合密度的K-L 散度和[18]最小化.GA 融合方法容易出現(xiàn)重復(fù)計(jì)算問(wèn)題[16]且在局部傳感器出現(xiàn)故障時(shí)會(huì)使融合性能下降[14,19],基于AA 融合方法[20?21]能有效地進(jìn)行魯棒,近似次優(yōu)的分布式融合,能夠有效應(yīng)對(duì)不同信源之間任意的關(guān)聯(lián)關(guān)系,且有較強(qiáng)的抗局部故障和高頻漏檢的能力,近年來(lái)引起了國(guó)際學(xué)術(shù)界注意[22?23].基于AA 融合的分布式多目標(biāo)跟蹤器目前尚無(wú)中文文獻(xiàn)報(bào)道.
然而目前在分布式傳感器多目標(biāo)跟蹤設(shè)計(jì)中,大多數(shù)都假設(shè)所有傳感器有相同的檢測(cè)能力和相同的感知范圍.在實(shí)際應(yīng)用中,每個(gè)傳感器的感知范圍或檢測(cè)能力是有限的[24?31],單個(gè)傳感器只能對(duì)視野(Fields of view,FoV)范圍內(nèi)的區(qū)域進(jìn)行檢測(cè),Gan Jonathan 等[26]將傳感器的檢測(cè)視野分為局部公共視野和外部視野,然后對(duì)公共視野的后驗(yàn)PHD粒子集進(jìn)行融合.信息加權(quán)共識(shí)[27]濾波器中通過(guò)對(duì)先驗(yàn)信息和量測(cè)適當(dāng)?shù)募訖?quán)進(jìn)行相鄰傳感器間的通信共享目標(biāo)狀態(tài)信息和局部信息,最大化后驗(yàn)參數(shù)來(lái)進(jìn)行有限感知范圍(Limited sensing range,LSR)中的目標(biāo)跟蹤.自適應(yīng)分布式算法[28]通過(guò)局部信息交換,對(duì)當(dāng)前得到的量測(cè)給予更高的權(quán)重調(diào)優(yōu)增益,從而實(shí)現(xiàn)目標(biāo)狀態(tài)估計(jì).李天成等[29]通過(guò)AA 融合方法實(shí)現(xiàn)有限傳感范圍的分布式PHD 濾波,將傳感器網(wǎng)絡(luò)范圍分為局部公共視野和外部視野,對(duì)于局部公共視野部分通過(guò)粒子交換和局部擴(kuò)散AA 融合,但未考慮非公共區(qū)域的互補(bǔ)融合.李溯琪等[30?31]通過(guò)相鄰傳感器之間的通信,采用GCI 融合方法實(shí)現(xiàn)有限感知范圍的多伯努利多目標(biāo)跟蹤.針對(duì)不同傳感器視場(chǎng)重疊和非重疊導(dǎo)致的復(fù)雜的補(bǔ)償性融合問(wèn)題[29],本文考慮通過(guò)對(duì)傳感器的視場(chǎng)進(jìn)行互補(bǔ),首次研究多伯努利濾波與AA 融合在有限感知范圍分布式多傳感器網(wǎng)絡(luò)中的多目標(biāo)跟蹤問(wèn)題.
本文主要解決的問(wèn)題和方法創(chuàng)新在于:1)由于傳感器的FoV 有限,不能得到整個(gè)場(chǎng)景的量測(cè)信息,提出視場(chǎng)互補(bǔ)原則彌補(bǔ)傳感器FoV 外的量測(cè),即對(duì)傳感器FoV 外的區(qū)域,通過(guò)其他傳感器的量測(cè)進(jìn)行互補(bǔ),其中,局部公共區(qū)域只能互補(bǔ)一次,從而避免對(duì)同一區(qū)域進(jìn)行重復(fù)互補(bǔ)以減少計(jì)算量,同時(shí)還可避免濾波后多傳感器后驗(yàn)信息融合進(jìn)行復(fù)雜的補(bǔ)償性融合問(wèn)題.2)針對(duì)多伯努利濾波中不同的伯努利分量代表不同的目標(biāo)而不能直接對(duì)伯努利后驗(yàn)密度進(jìn)行AA 融合的問(wèn)題,采用伯努利關(guān)聯(lián)AA 融合方法,即每個(gè)局部傳感器單獨(dú)運(yùn)行MeMBer 濾波并與相鄰傳感器通信共享后驗(yàn)信息,對(duì)共享結(jié)果按距離劃分進(jìn)行伯努利關(guān)聯(lián)將可能是同一目標(biāo)的伯努利分量關(guān)聯(lián)到同一子集中,隨后對(duì)不同的關(guān)聯(lián)子集進(jìn)行伯努利后驗(yàn)AA 融合并完成融合狀態(tài)估計(jì).3)最后通過(guò)序貫蒙特卡洛[9,32?33] (Sequential Monte Carlo,SMC)方法實(shí)現(xiàn)所提出的多伯努利關(guān)聯(lián)AA融合,為了減少通信成本和計(jì)算成本以及滿足伯努利關(guān)聯(lián)的需要,本文將粒子后驗(yàn)分布進(jìn)行參數(shù)化轉(zhuǎn)化,從而實(shí)現(xiàn)高效的高斯參數(shù)通信與融合.
1 問(wèn)題背景及模型
1.1 多伯努利隨機(jī)有限集
本文采用一般的慣例,對(duì)于單目標(biāo)狀態(tài)用小寫(xiě)英文字母表示,如x.若是多目標(biāo)狀態(tài)則用大寫(xiě)的英文字母表示,如X.單個(gè)量測(cè)用小寫(xiě)的英文字母表示,如z,多量測(cè)信息用大寫(xiě)的英文字母表示,如Z.此外用白斜體的英文大寫(xiě)字母表示空間,如目標(biāo)空間X,量測(cè)空間Z,空間的所有有限子集的集合表示成F(X).
在多目標(biāo)檢測(cè)跟蹤中,每個(gè)時(shí)刻的目標(biāo)狀態(tài)和目標(biāo)個(gè)數(shù)都是隨機(jī)的,故將目標(biāo)狀態(tài)建模為RFS.設(shè)k時(shí)刻的目標(biāo)狀態(tài)表示為Xk={x1,x2,···,xn}∈F(X),xi ∈X,其中n=|Xk|表示目標(biāo)個(gè)數(shù).k ?1時(shí)刻的目標(biāo)狀態(tài)xk?1要么以存活概率pS,k要么以概率 1?pS,k消失.另外,在k時(shí)刻也可能有新生目標(biāo)的出現(xiàn),其新生概率為pb,k,故k時(shí)刻的目標(biāo)狀態(tài)Xk可建模為
其中θk,s(xk) 表示目標(biāo)量測(cè)RFS,Kk,s表示雜波量測(cè)RFS.
多伯努利隨機(jī)有限集X是M個(gè)相互獨(dú)立的伯努利隨機(jī)有限集X(l)的并集,即:
其中,每個(gè)伯努利RFSX(l)要么是空的,其概率為1?r(l),要么有一個(gè)其概率為r(l)的元素,且在狀態(tài)空間中的分布服從概率密度函數(shù)(Probability density function,PDF)[7].即,伯努利RFS 的PDF 為:
1.2 基于LSR 的分布式傳感器網(wǎng)絡(luò)模型
考慮由一組LSR 的傳感器組成的傳感器網(wǎng)絡(luò),其拓?fù)浣Y(jié)構(gòu)可以表示為一個(gè)無(wú)向連接圖 (S,E),其中S={1,2,···,S}為圖的節(jié)點(diǎn)集合,即傳感器節(jié)點(diǎn)集合,E ?S×S為圖的邊,代表通信鏈路.例如,(i,j)∈E或 (j,i)∈E表示的是傳感器節(jié)點(diǎn)i與傳感器節(jié)點(diǎn)j之間是可以相互連接的,(i,j)∈/E表示傳感器節(jié)點(diǎn)i與傳感器節(jié)點(diǎn)j之間不能互通.與傳感器j相鄰的所有傳感器的集合記為Sj:={i ∈S|(i,j)∈E},其中并不包含傳感器節(jié)點(diǎn)j. 另外,對(duì)?t ∈N,用Sj(t) 表示經(jīng)過(guò)t步通信可以到達(dá)傳感器節(jié)點(diǎn)j的所有傳感器節(jié)點(diǎn)的集合,用表示不超過(guò)t步通信可以到達(dá)傳感器節(jié)點(diǎn)j的傳感器的集合,故Sj(1)=Sj,Sj(0)=j.用 F oVs表示傳感器s的檢測(cè)范圍,R表示傳感器網(wǎng)絡(luò)中所有傳感器的監(jiān)視區(qū)域.如圖1 是由3個(gè)傳感范圍有限的傳感器組成的網(wǎng)絡(luò),則第1個(gè)傳感器的檢測(cè)范圍表示為
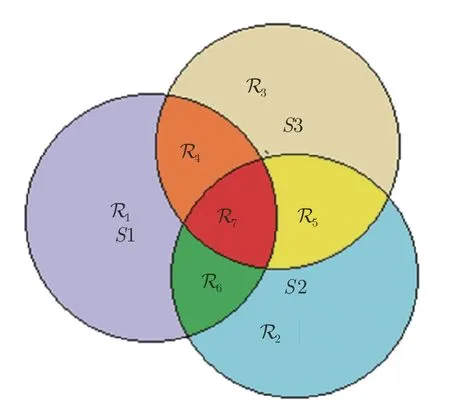
圖1 有限傳感范圍分布式傳感器網(wǎng)絡(luò)Fig.1 Distributed sensor networks with limited sensing range

其中Ri表示第i個(gè)區(qū)域,滿足?ij,Ri ∩Rj=?.整個(gè)分布式網(wǎng)絡(luò)的監(jiān)視區(qū)域R為
1.3 伯努利AA 融合
文獻(xiàn)[18,21]指出,AA 融合結(jié)果相對(duì)于各個(gè)局部融合密度的K-L 散度的加權(quán)和最小,即:

其中g(shù)(X) 關(guān)于f(X) 的K-L 散度如下

事實(shí)上,將上述K-L 散度換成歐氏平方距離仍然成立[10].上述結(jié)果意味著,AA 融合是對(duì)不同信息源最小信息熵的近似,其保留了不同信源的全部信息.
2 分布式有限感知網(wǎng)絡(luò)視場(chǎng)互補(bǔ)原則
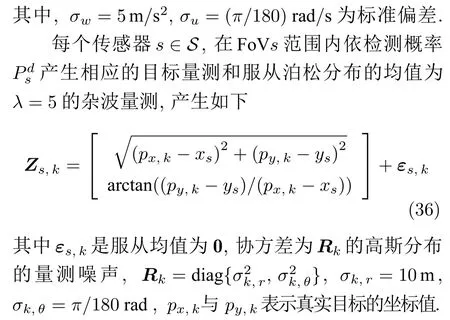
在基于LSR 的分布式傳感器網(wǎng)絡(luò)中,每個(gè)傳感器s只能在自己的 F oVs內(nèi)產(chǎn)生相應(yīng)的量測(cè)集ZsFoVs,通常無(wú)法實(shí)現(xiàn)對(duì)整個(gè)跟蹤場(chǎng)景內(nèi)的所有目標(biāo)進(jìn)行檢測(cè).要對(duì)整個(gè)跟蹤場(chǎng)景內(nèi)所有目標(biāo)進(jìn)行檢測(cè)和跟蹤,需要不同傳感器之間相互協(xié)作完成量測(cè)信息共享,而直接將每個(gè)傳感器上的所有量測(cè)信息共享到同一個(gè)傳感器上,由于不同傳感器之間存在重復(fù)視場(chǎng)使得這些區(qū)域的量測(cè)信息被重復(fù)共享,從而導(dǎo)致濾波過(guò)程中會(huì)出現(xiàn)組合爆炸問(wèn)題,計(jì)算成本高[31].如圖1所示,由3個(gè)視場(chǎng)受限的傳感器組成的分布式網(wǎng)絡(luò)中,當(dāng)傳感器2 和傳感器3 對(duì)傳感器1 進(jìn)行量測(cè)信息共享時(shí),R7區(qū)域就被重復(fù)共享2 次,R4,R5,R6都被重復(fù)互補(bǔ)1 次,導(dǎo)致在傳感器1 上有很多重復(fù)區(qū)域的量測(cè)數(shù)據(jù),增加了計(jì)算成本.為此,本文提出視場(chǎng)互補(bǔ)方法在保證每個(gè)傳感器有效進(jìn)行多目標(biāo)跟蹤的同時(shí)降低計(jì)算量.
當(dāng)對(duì)第s個(gè)傳感器進(jìn)行視場(chǎng)互補(bǔ)時(shí),只需對(duì)FoVs范圍外的區(qū)域進(jìn)行互補(bǔ),依次按照傳感器i=1,2的順序進(jìn)行.設(shè)到第i(is)個(gè)傳感器對(duì)傳感器s互補(bǔ)時(shí),需要通過(guò) F oVi進(jìn)行互補(bǔ),此時(shí),在FoVi中已互補(bǔ)的區(qū)域?yàn)?

故在 F oVi中未對(duì)傳感器s互補(bǔ)的區(qū)域?yàn)?/p>
注1.上述視場(chǎng)互補(bǔ)方法是按照傳感器編號(hào)的順序依次進(jìn)行視場(chǎng)互補(bǔ)的,因此不同的編號(hào)方式會(huì)導(dǎo)致最終傳感器互補(bǔ)的結(jié)果是存在差異,由于后續(xù)的融合跟蹤仍需要進(jìn)行相鄰傳感器之間后驗(yàn)信息通信融合,從而傳感器互補(bǔ)結(jié)果的差異對(duì)后續(xù)融合跟蹤性能的影響不明顯.
視場(chǎng)互補(bǔ)完成后,每個(gè)局部傳感器都包含了傳感網(wǎng)中所有傳感器能觀測(cè)到的場(chǎng)景內(nèi)的量測(cè)信息,且局部公共視場(chǎng)內(nèi)的量測(cè)不會(huì)重復(fù)共享.本節(jié)所提的視場(chǎng)互補(bǔ)原則對(duì)于視場(chǎng)受限的分布式傳感器之間的后驗(yàn)通信融合是有必要的.首先,直接進(jìn)行相鄰傳感器之間的后驗(yàn)信息通信融合,由于每個(gè)傳感器的視場(chǎng)有限,與相鄰傳感器通信后也不能保證局部傳感器包含整個(gè)跟蹤場(chǎng)景的后驗(yàn)信息,故仍會(huì)發(fā)生漏跟或者誤跟.其次,即使和足夠多的相鄰傳感器通信之后使得通信結(jié)果包含整個(gè)場(chǎng)景的后驗(yàn)信息,在融合的時(shí)仍需考慮公共視場(chǎng)和非公共視場(chǎng)的補(bǔ)償性融合問(wèn)題[27],但通過(guò)視場(chǎng)互補(bǔ)后,無(wú)需考慮補(bǔ)償性融合問(wèn)題,使得融合更加方便.此外,每個(gè)傳感器運(yùn)行多伯努利濾波時(shí),目標(biāo)的新生也會(huì)對(duì)跟蹤性能產(chǎn)生很大的影響.不進(jìn)行視場(chǎng)互補(bǔ)的情況下,每個(gè)傳感器濾波時(shí)都只能在局部視場(chǎng)內(nèi)進(jìn)行新生,容易導(dǎo)致目標(biāo)不能及時(shí)的被檢測(cè)到;進(jìn)行視場(chǎng)互補(bǔ)后,目標(biāo)新生范圍可擴(kuò)展到整個(gè)場(chǎng)景,每個(gè)新生目標(biāo)都能同時(shí)通過(guò)多個(gè)傳感器的量測(cè)進(jìn)行跟蹤,部分傳感器沒(méi)有及時(shí)跟蹤上新生目標(biāo),也可以通過(guò)其他傳感器彌補(bǔ),有效提高跟蹤性能.
3 分布式多伯努利關(guān)聯(lián)AA 融合
本節(jié)在視場(chǎng)互補(bǔ)的基礎(chǔ)上介紹多伯努利關(guān)聯(lián)AA 融合方法的實(shí)現(xiàn).
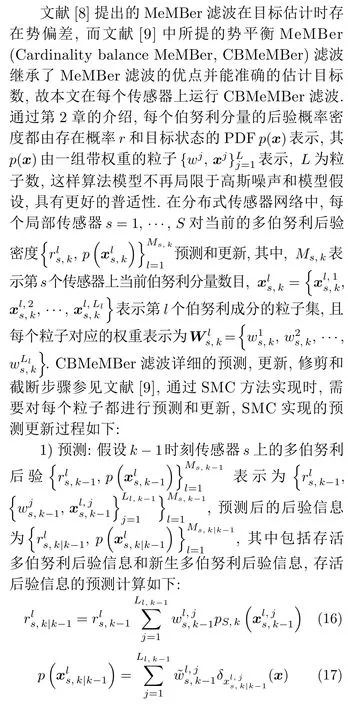
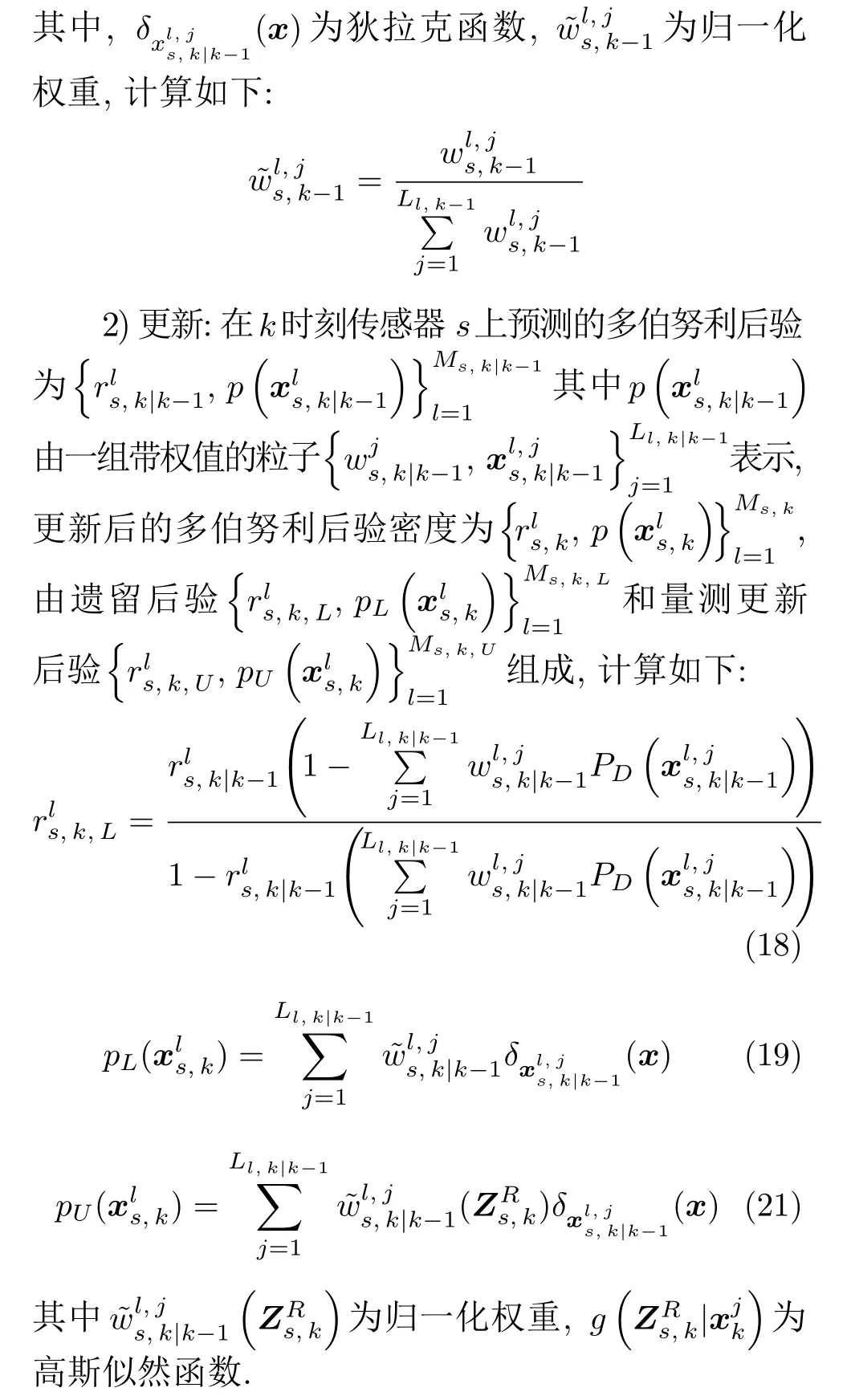
3.1 多伯努利濾波
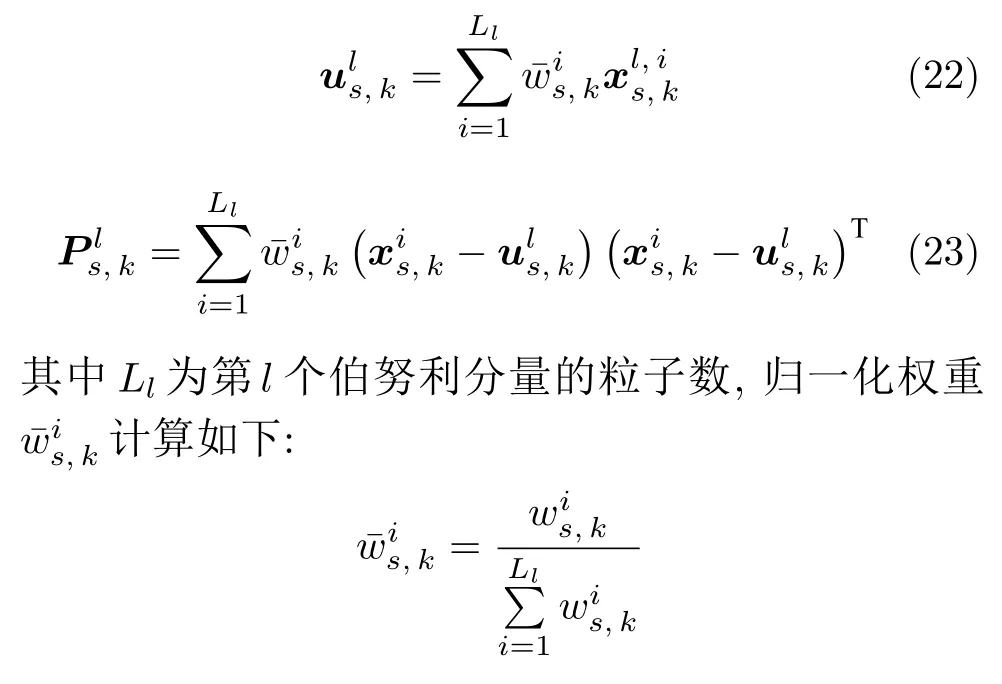
3.2 粒子后驗(yàn)分布的參數(shù)化

3.3 伯努利關(guān)聯(lián)AA 融合
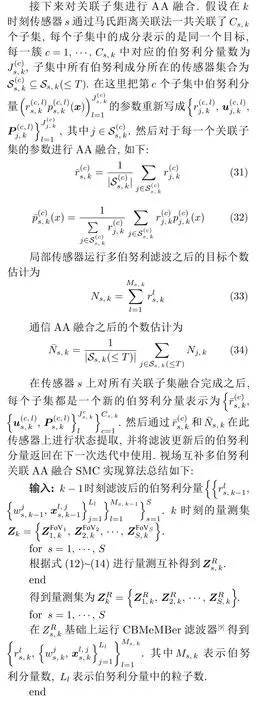
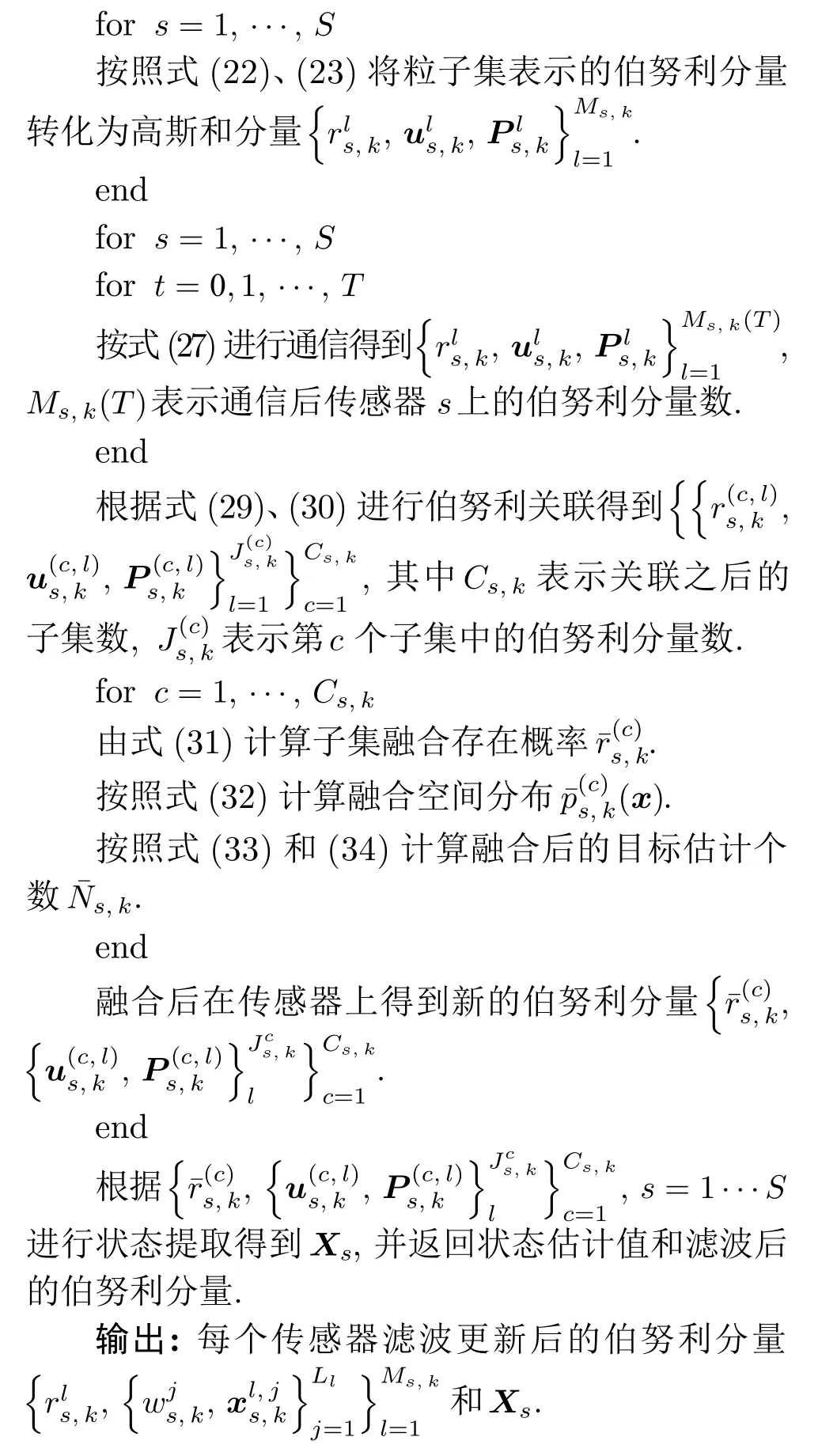
通過(guò)相鄰傳感器之間的信息通信,使得每個(gè)傳感器都包含相鄰傳感器的后驗(yàn)信息.文獻(xiàn)[19?21]中的泛洪通信方法有較快地收斂速度,而且可以有效應(yīng)對(duì)有限視場(chǎng)FoV 不完全重合場(chǎng)景[29],故本文使用該方法進(jìn)行相鄰傳感器之間的通信.設(shè)傳感器間通信迭代次數(shù)為t=0,1,···,T,Ss(t) 表示與第s個(gè)傳感器的距離為t的相鄰傳感器的集合.傳感器s=1,···,S迭代t次之后,該傳感器上的后驗(yàn)概率密度集合為
用存在概率r和空間分布p(x) 以及粒子集進(jìn)行描述時(shí),迭代t次之后可表示如下:
由于已經(jīng)進(jìn)行了伯努利粒子后驗(yàn)參數(shù)化,故通信后的結(jié)果可重新表示為:
通信完成之后,在每個(gè)傳感器節(jié)點(diǎn)上進(jìn)行局部多伯努利AA 融合操作.由第1.3 節(jié)的介紹可知,在單伯努利濾波中,設(shè)每個(gè)傳感器s=1,···,S濾波后的的伯努利后驗(yàn)概率密度為πs(X),則通信后傳感器之間的伯努利AA 融合為[21]:
但在CBMeMBer 濾波中,由于每個(gè)傳感器的后驗(yàn)密度πs(X) 都是多伯努利隨機(jī)參數(shù)集形式的,每個(gè)伯努利成分代表不同的目標(biāo),故不能直接用式(28)進(jìn)行融合[10].本文通過(guò)對(duì)通信后的伯努利分量進(jìn)行關(guān)聯(lián),將同一目標(biāo)的伯努利分量關(guān)聯(lián)到同一個(gè)子集中,然后對(duì)每一個(gè)關(guān)聯(lián)子集用式(28)進(jìn)行AA融合.伯努利分量的關(guān)聯(lián)采用距離關(guān)聯(lián)法[19],計(jì)算傳感器s上通信后來(lái)自不同傳感器s′ ∈Ss(≤t) 的伯努利分量后驗(yàn)參數(shù)化的高斯均值之間的馬氏距離:
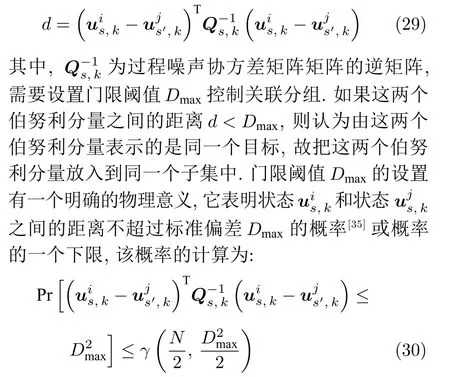
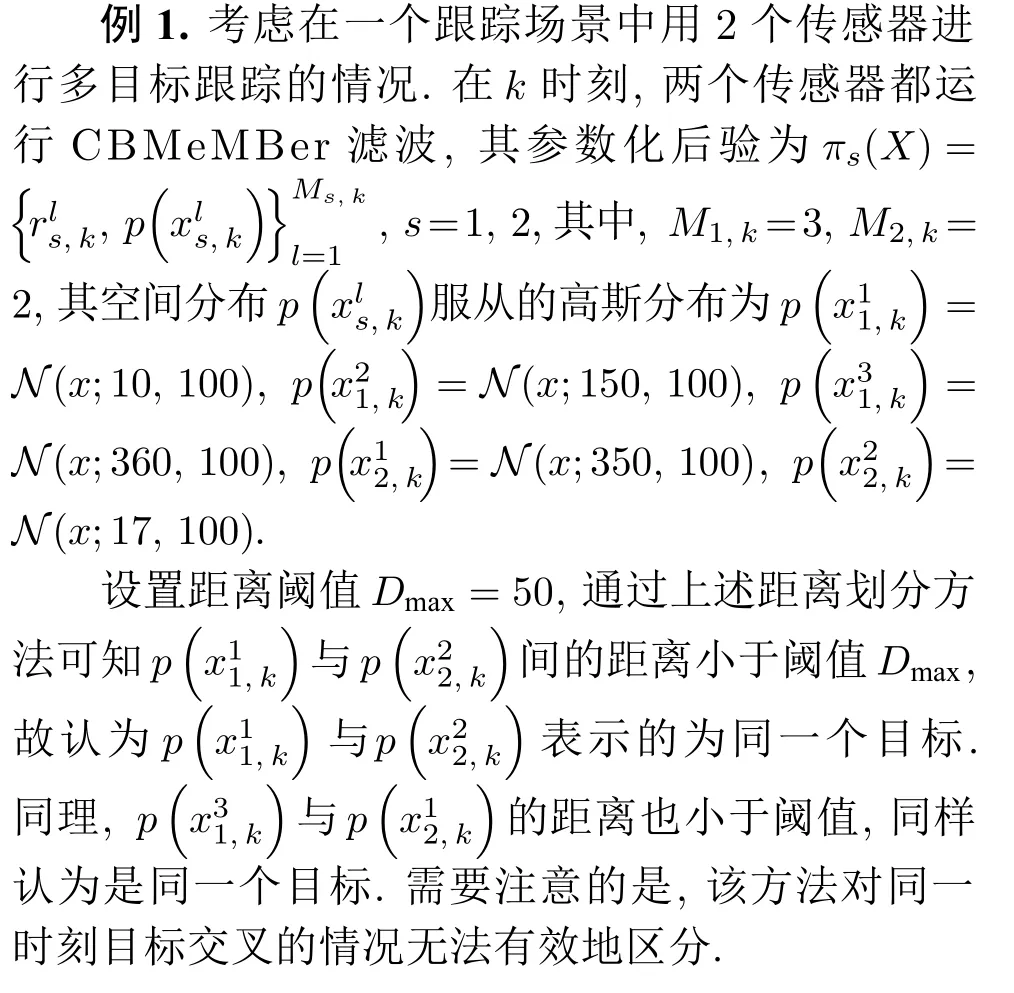
其中,N表示目標(biāo)狀態(tài)的個(gè)數(shù),γ表示不完全卡方分布.下面通過(guò)一個(gè)簡(jiǎn)單的實(shí)例說(shuō)明距離劃分關(guān)聯(lián)方法.
4 仿真實(shí)驗(yàn)
4.1 仿真設(shè)置
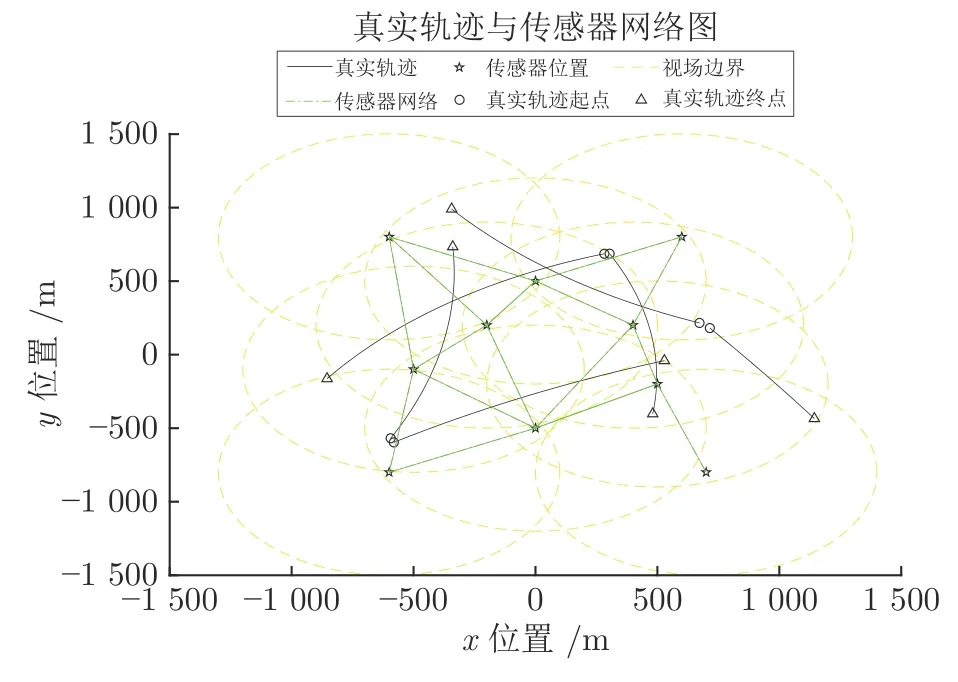
圖2 分布式傳感器網(wǎng)絡(luò)與真實(shí)軌跡Fig.2 Distributed sensor networks and real trajectories
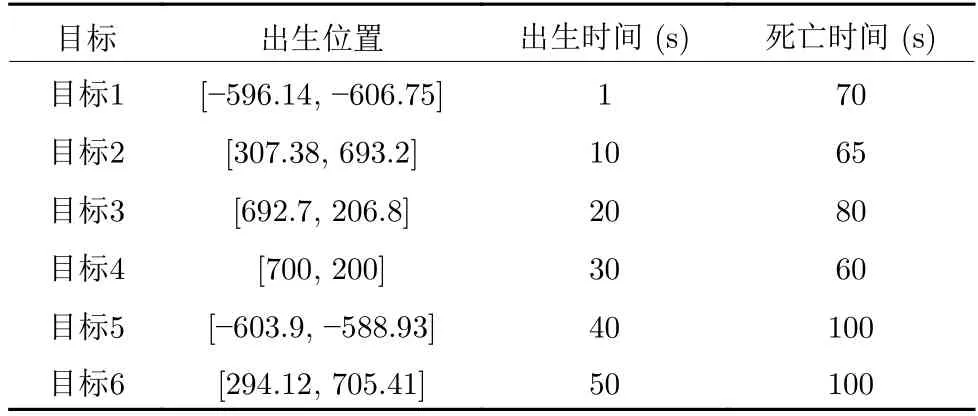
表1 目標(biāo)初始位置和存活時(shí)間Table 1 Target's initial position and survival time
濾波性能通過(guò)最優(yōu)子模式(Optimal subpattern assignment,OSPA)[36]誤差來(lái)評(píng)估,其中,階數(shù)參數(shù)p=1,懲罰參數(shù)c=100 m.設(shè)置不同的仿真場(chǎng)景進(jìn)行比較分析.
4.2 場(chǎng)景1:視場(chǎng)互補(bǔ)性能驗(yàn)證
為驗(yàn)證本文所提視場(chǎng)互補(bǔ)法相對(duì)于直接量測(cè)交換在跟蹤有效性和計(jì)算效率的提升,通過(guò)單傳感器進(jìn)行濾波跟蹤.實(shí)驗(yàn)中,傳感網(wǎng)的所有傳感器都具有相同的性能,即每個(gè)傳感器的傳感半徑均為rs=700 m ,檢測(cè)概率均為=0.9.由于每個(gè)傳感器都進(jìn)行視場(chǎng)互補(bǔ),但互補(bǔ)后的量測(cè)數(shù)據(jù)存在差異,故先驗(yàn)證互補(bǔ)后各個(gè)單傳感器跟蹤性能的差異.每個(gè)單傳感器視場(chǎng)互補(bǔ)后單獨(dú)運(yùn)行CBMeMBer 濾波進(jìn)行目標(biāo)估計(jì),并統(tǒng)計(jì)每個(gè)傳感器100 次蒙特卡洛(Monte Carlo,MC) 實(shí)驗(yàn)跟蹤性能的時(shí)間平均OSPA (Time-averaged network OSPA,TNOSPA)誤差,實(shí)驗(yàn)結(jié)果如圖3 所示.
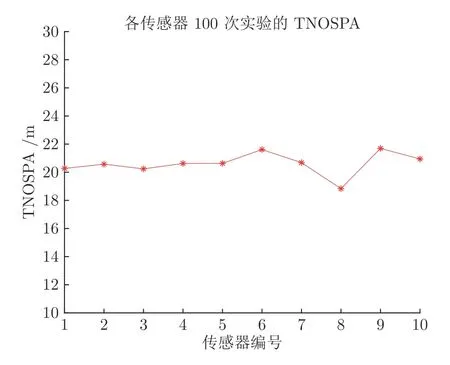
圖3 各傳感器視場(chǎng)互補(bǔ)后濾波跟蹤的TNOSPAFig.3 Tracking error TNOSPA of local sensors with complementary field of view
由圖3 可知,各傳感器單獨(dú)跟蹤的性能存在一些差異,但是從圖中看出各傳感器之間的差異不明顯,并且單傳感器濾波后還需要進(jìn)行相鄰傳感器之間的通信融合,這種差異的影響就更小.故在該場(chǎng)景中隨機(jī)選取第7個(gè)傳感器進(jìn)行單傳感器在不同情況下的跟蹤性能對(duì)比,以下三種情況對(duì)比.M1:所有的局部傳感器不進(jìn)行視場(chǎng)互補(bǔ),用第7個(gè)傳感器獨(dú)立的進(jìn)行CBMeMBer 跟蹤(未互補(bǔ)估計(jì)).M2:所有局部傳感器通過(guò)視場(chǎng)互補(bǔ)算法進(jìn)行量測(cè)互補(bǔ)然后進(jìn)行CBMeMBer 濾波跟蹤,用第7個(gè)傳感器的結(jié)果進(jìn)行對(duì)比(互補(bǔ)估計(jì)).M3:所有傳感器的量測(cè)信息都共享到第7個(gè)傳感器,然后進(jìn)行CBMeMBer 濾波跟蹤(共享估計(jì)).首先對(duì)M1 和M2 進(jìn)行仿真驗(yàn)證視場(chǎng)互補(bǔ)在跟蹤性能上的有效性,仿真結(jié)果如圖4 和圖5 所示.
圖4(a)與圖5(a)中點(diǎn)虛線內(nèi)的范圍所表示的是第7個(gè)傳感器的視場(chǎng)范圍,通過(guò)圖4(a)與圖5(a)的仿真跟蹤結(jié)果對(duì)比可以明顯看出,不經(jīng)過(guò)任何處理的情況下,單個(gè)傳感器只能對(duì)自己視場(chǎng)內(nèi)的目標(biāo)進(jìn)行跟蹤,而經(jīng)過(guò)視場(chǎng)互補(bǔ)后用單個(gè)傳感器能對(duì)整個(gè)場(chǎng)景的目標(biāo)進(jìn)行跟蹤,跟蹤性能明顯提升.從圖4(b)和圖5(b)的OSPA 誤差結(jié)果也可以看出進(jìn)行視場(chǎng)互補(bǔ)之后的OSPA 誤差明顯小很多,由以上分析可表明視場(chǎng)互補(bǔ)算法是有效的.
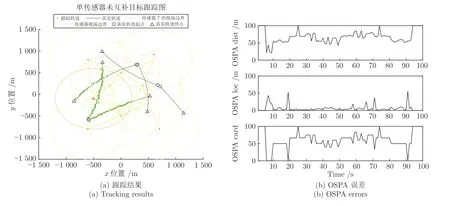
圖4 M1 情況下目標(biāo)跟蹤性能Fig.4 Target tracking performance in M1
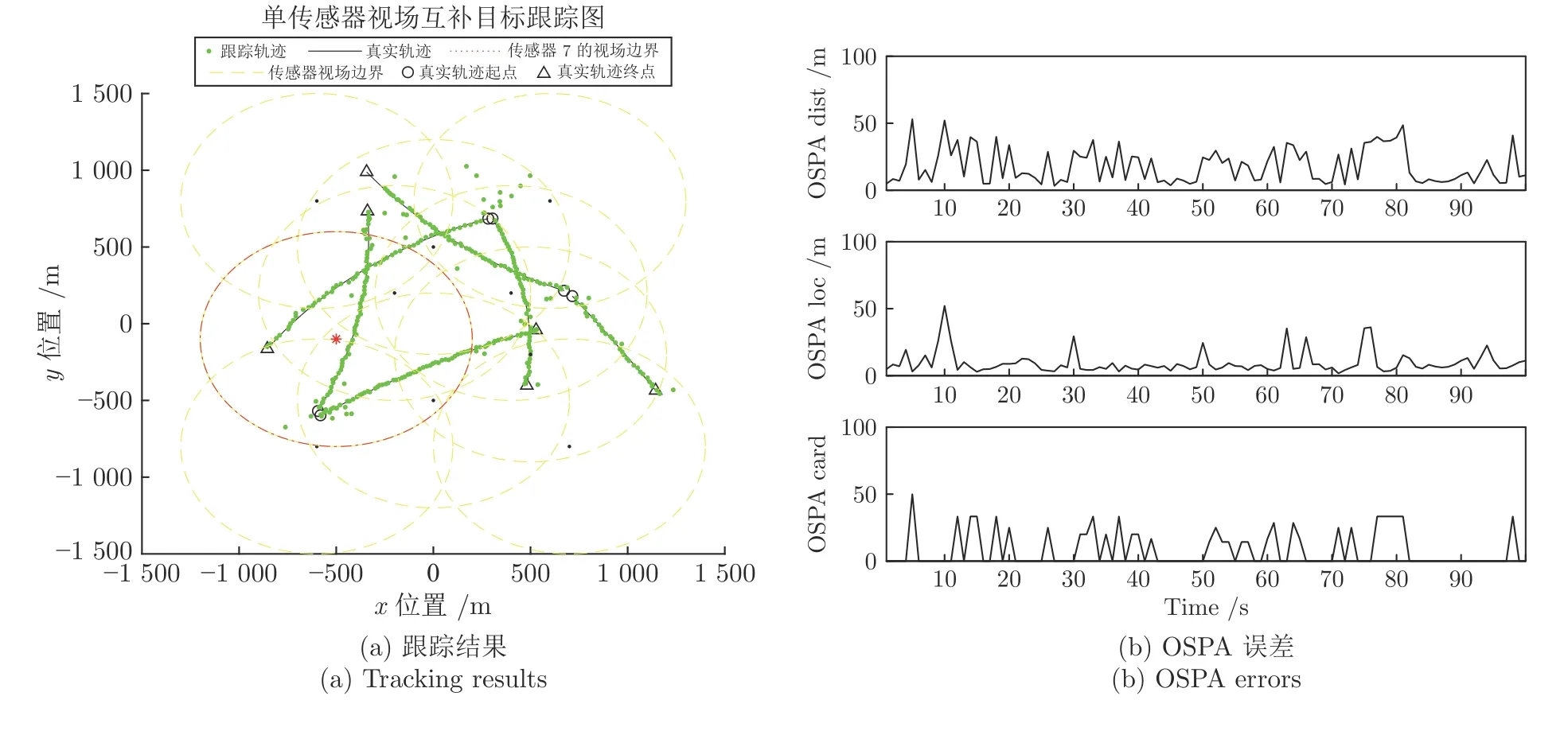
圖5 M2 情況下目標(biāo)跟蹤性能Fig.5 Target tracking performance in M2
然后,繼續(xù)選用第7個(gè)傳感器對(duì)M1,M2 和M3進(jìn)行仿真,運(yùn)行200 次MC 實(shí)驗(yàn),并統(tǒng)計(jì)OSPA 誤差和勢(shì)估計(jì),以及每種方法的運(yùn)行時(shí)間,驗(yàn)證視場(chǎng)互補(bǔ)方法相對(duì)直接共享所有量測(cè)信息在計(jì)算效率上能有顯著提升.仿真結(jié)果對(duì)比圖如圖6 所示,單次MC 運(yùn)行平均時(shí)間如表2 所示.
由圖6(a)的OSPA 誤差統(tǒng)計(jì)圖可以看出,通過(guò)視場(chǎng)互補(bǔ)和共享所有量測(cè)信息方法的誤差都明顯比未處理方法的誤差要小很多,但是視場(chǎng)互補(bǔ)方法的平均誤差更小一些.從圖6(b)可以看出M2 方法在目標(biāo)勢(shì)估計(jì)上與真實(shí)目標(biāo)勢(shì)相近,而M3 方法對(duì)目標(biāo)勢(shì)嚴(yán)重過(guò)估,這是因?yàn)樵贛3 中,同一個(gè)目標(biāo)會(huì)有很多個(gè)量測(cè),所以也就導(dǎo)致了圖6(a)中M3 方法的平均OSPA 誤差要比M2 方法的平均OSPA誤差大.再?gòu)谋? 所示的單次MC 平均運(yùn)行時(shí)間可以看出M2 視場(chǎng)互補(bǔ)方法比M3 共享所有量測(cè)信息的方法要快近3 倍.通過(guò)上面對(duì)比分析可知本文所提的視場(chǎng)互補(bǔ)方法在多目標(biāo)跟蹤中是有效的,而且明顯的提升了計(jì)算效率.
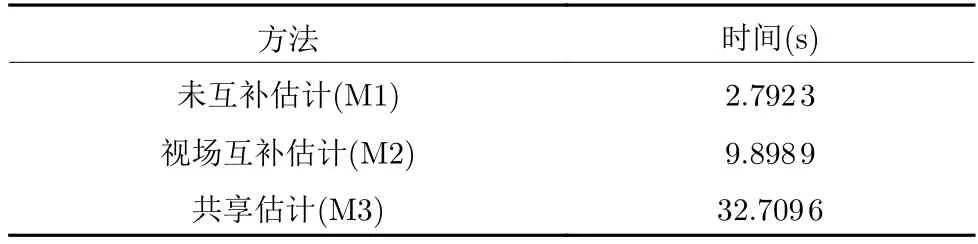
表2 單次MC 平均運(yùn)行時(shí)間Table 2 Average running time per MC
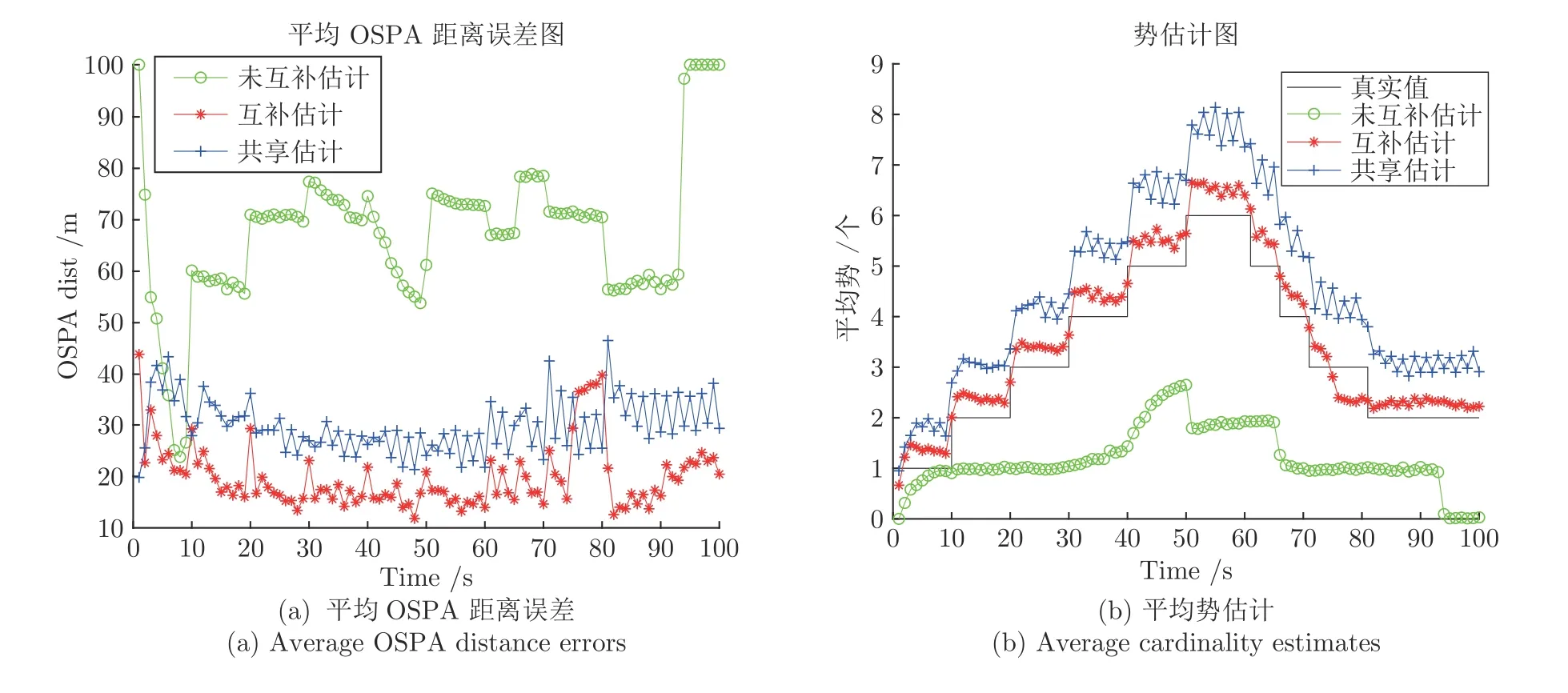
圖6 第7個(gè)傳感器跟蹤性能對(duì)比結(jié)果Fig.6 The sensor 7 tracks performance comparison results
4.3 場(chǎng)景2:分布式視場(chǎng)互補(bǔ)多伯努利關(guān)聯(lián)AA 融合性能分析
在LSR 分布式傳感器網(wǎng)絡(luò)中,網(wǎng)絡(luò)直徑D=5,泛洪通信迭代最大值T=3,其他設(shè)置同場(chǎng)景1.下面將對(duì)不同的方法進(jìn)行仿真對(duì)比.先對(duì)本文所提出的基于LSR 的視場(chǎng)互補(bǔ)分布式多伯努利關(guān)聯(lián)AA融合估計(jì)方法(互補(bǔ)融合估計(jì))進(jìn)行仿真.然后,在LSR 分布式傳感器網(wǎng)絡(luò)背景下,仿真了幾個(gè)不同的方法,并與本文方法進(jìn)行對(duì)比.方法1 是各局部傳感器不進(jìn)行信息共享和視場(chǎng)互補(bǔ),直接運(yùn)行CBMeMBer 濾波器,再進(jìn)行相鄰傳感器之間的伯努利通信關(guān)聯(lián)AA 融合估計(jì)(未互補(bǔ)融合估計(jì)).方法2選用文獻(xiàn)[10,21]中的泛洪通信方法直接對(duì)傳感器的量測(cè)進(jìn)行通信,然后對(duì)通信結(jié)果進(jìn)行密度聚類[37]操作,以聚類中心作為目標(biāo)估計(jì)結(jié)果(量測(cè)聚類估計(jì)).方法3 是本文提出的方法,選用場(chǎng)景1 的M2情況,傳感器之間進(jìn)行視場(chǎng)互補(bǔ),然后運(yùn)行單傳感器局部多伯努利濾波進(jìn)行目標(biāo)估計(jì)(單互補(bǔ)估計(jì)).方法4 選用場(chǎng)景1 的M3 方法,共享所有量測(cè)信息,再進(jìn)行濾波估計(jì)(單共享估計(jì)).每個(gè)方法都運(yùn)行100 次MC 仿真實(shí)驗(yàn),并統(tǒng)計(jì)仿真結(jié)果的OSPA 誤差和勢(shì)估計(jì)誤差,統(tǒng)計(jì)結(jié)果如圖7 所示,且每個(gè)方法的平均運(yùn)行時(shí)間如表3 所示.
圖7(a)表示目標(biāo)跟蹤結(jié)果圖,本文方法能有效的進(jìn)行跟蹤.從圖7(b)是不同方法下的平均勢(shì)估計(jì),從結(jié)果可以看出,視場(chǎng)互補(bǔ)后再通過(guò)關(guān)聯(lián)AA融合的方法比其他幾種方法的勢(shì)估計(jì)更加的準(zhǔn)確,始終接近真實(shí)值.圖7(c)表示不同方法下的平均OSPA 誤差統(tǒng)計(jì)結(jié)果,可以看出本文所提方法的OSPA 誤差更小,明顯比未進(jìn)行互補(bǔ)直接關(guān)聯(lián)融合的方法有效.該仿真結(jié)果表明本文所提視場(chǎng)互補(bǔ)多伯努利關(guān)聯(lián)AA 融合方法對(duì)視場(chǎng)受限的分布式傳感器網(wǎng)絡(luò)多目標(biāo)跟蹤是有效的.從表3 的平均運(yùn)行時(shí)間可知視場(chǎng)互補(bǔ)單傳感器濾波的運(yùn)行速度是最快的,而運(yùn)行泛洪通信伯努利關(guān)聯(lián)AA 融合的方法的運(yùn)行速度是最慢的,但是從圖7 可知該方法提高了跟蹤性能.
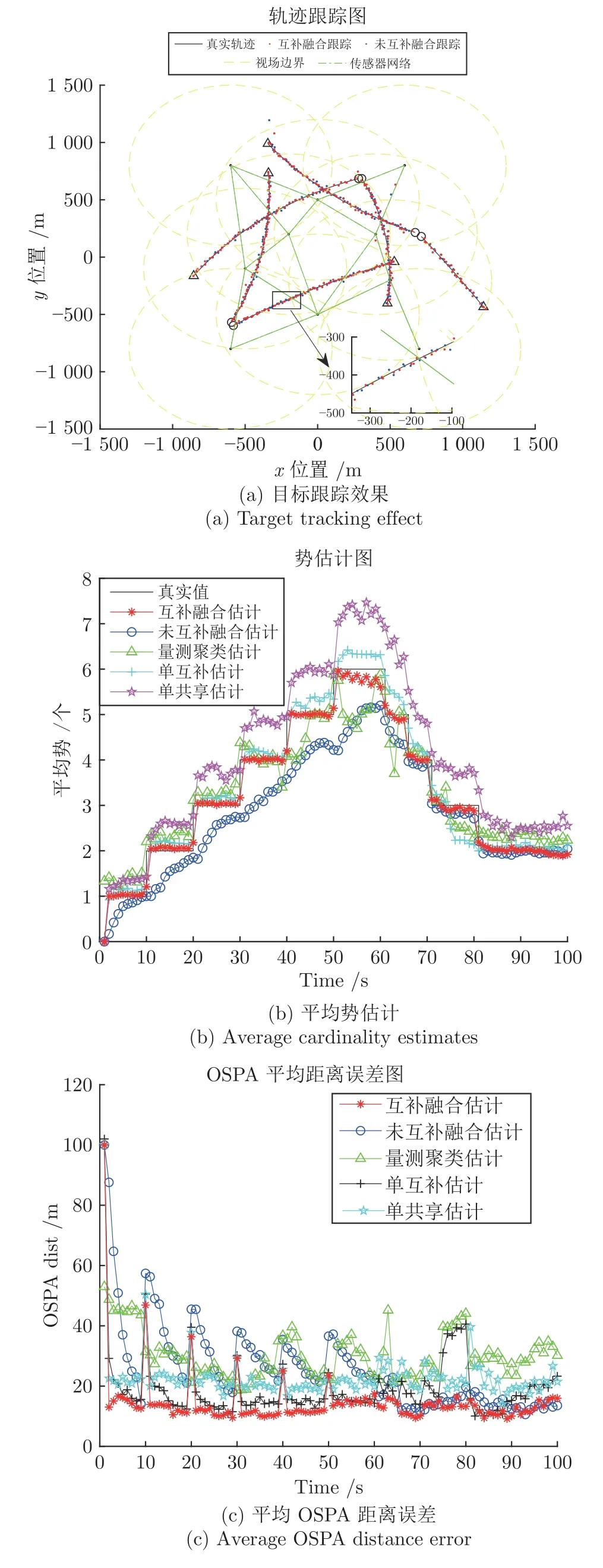
圖7 多傳感器多伯努利濾波AA 融合仿真效果Fig.7 Multi-sensor multi-Bernoulli filter AA fusion simulation effect
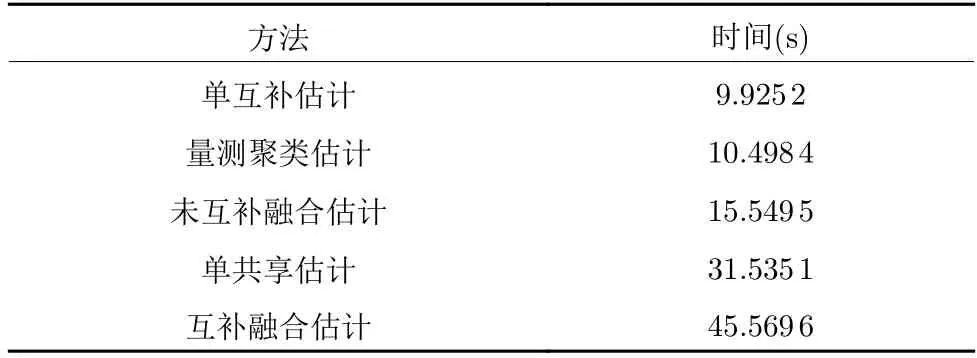
表3 單次MC 平均運(yùn)行時(shí)間Table 3 Average running time per MC
4.4 場(chǎng)景3:增加目標(biāo)數(shù)進(jìn)行多目標(biāo)跟蹤綜合分析
為了進(jìn)一步驗(yàn)證本文方法是否適應(yīng)更多目標(biāo)的場(chǎng)景,在場(chǎng)景2 的基礎(chǔ)上將目標(biāo)數(shù)增加至11個(gè)進(jìn)行仿真實(shí)驗(yàn),其中有部分目標(biāo)存活時(shí)間較短,該場(chǎng)景中目標(biāo)同時(shí)存活的目標(biāo)最大數(shù)為8個(gè).并在不同的存活概率和檢測(cè)概率下進(jìn)行實(shí)驗(yàn)以驗(yàn)證本文方法的有效性和魯棒性.同樣每個(gè)方法運(yùn)行100 次MC實(shí)驗(yàn),并統(tǒng)計(jì)其勢(shì)估計(jì)與OSPA 誤差,仿真結(jié)果如圖8,圖9 和圖10 所示.
由圖8(a)可知,在目標(biāo)數(shù)較多時(shí),本文所提方法仍能有效地對(duì)目標(biāo)進(jìn)行跟蹤.從圖8(b)目標(biāo)勢(shì)估計(jì)可以看出所提方法在勢(shì)估計(jì)上始終與真實(shí)值接近,優(yōu)于其他對(duì)比方法.從8(c)可以看出,通過(guò)互補(bǔ)后進(jìn)行AA 融合估計(jì)方法始終比較穩(wěn)定,且誤差相對(duì)于其他方法更低,這表明該算法進(jìn)行多目標(biāo)跟蹤的有效性.從圖中也能看出OSPA 在某些時(shí)刻存在峰值,這是由于目標(biāo)出現(xiàn)和消失沒(méi)有及時(shí)檢測(cè)到而導(dǎo)致的.
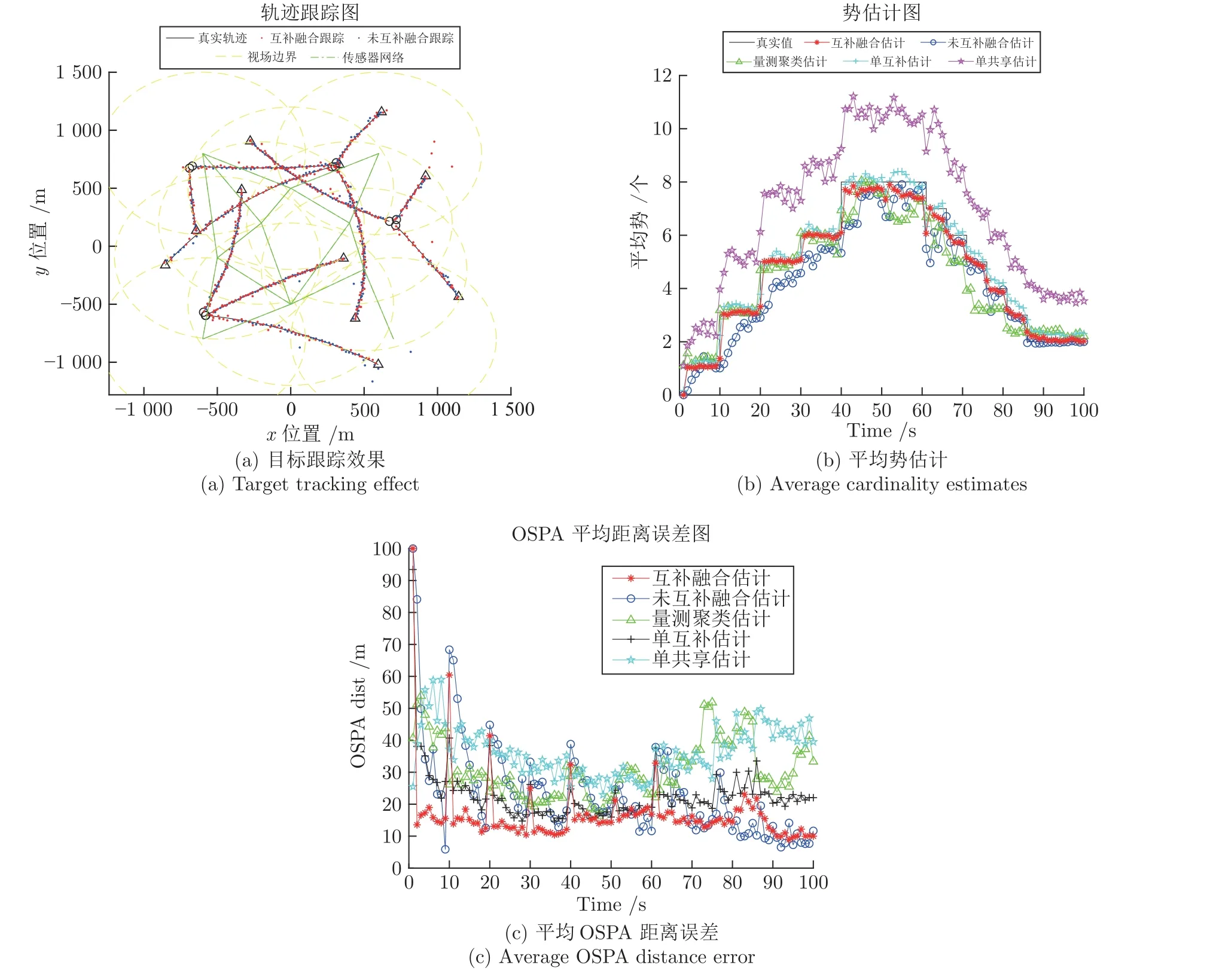
圖8 目標(biāo)數(shù)為11 的仿真效果Fig.8 Simulation effect with the target number of 11
圖9 是所提的互補(bǔ)后再進(jìn)行伯努利關(guān)聯(lián)AA 融合方法在不同存活率下的跟蹤性能對(duì)比圖.從圖中可以看出本文方法在不同存活率下的跟蹤性能差異不明顯,都能有效地進(jìn)行多目標(biāo)跟蹤,但存活率越高,性能會(huì)更優(yōu),這也表明本文方法針對(duì)不同的存活率具有魯棒性和穩(wěn)健性.
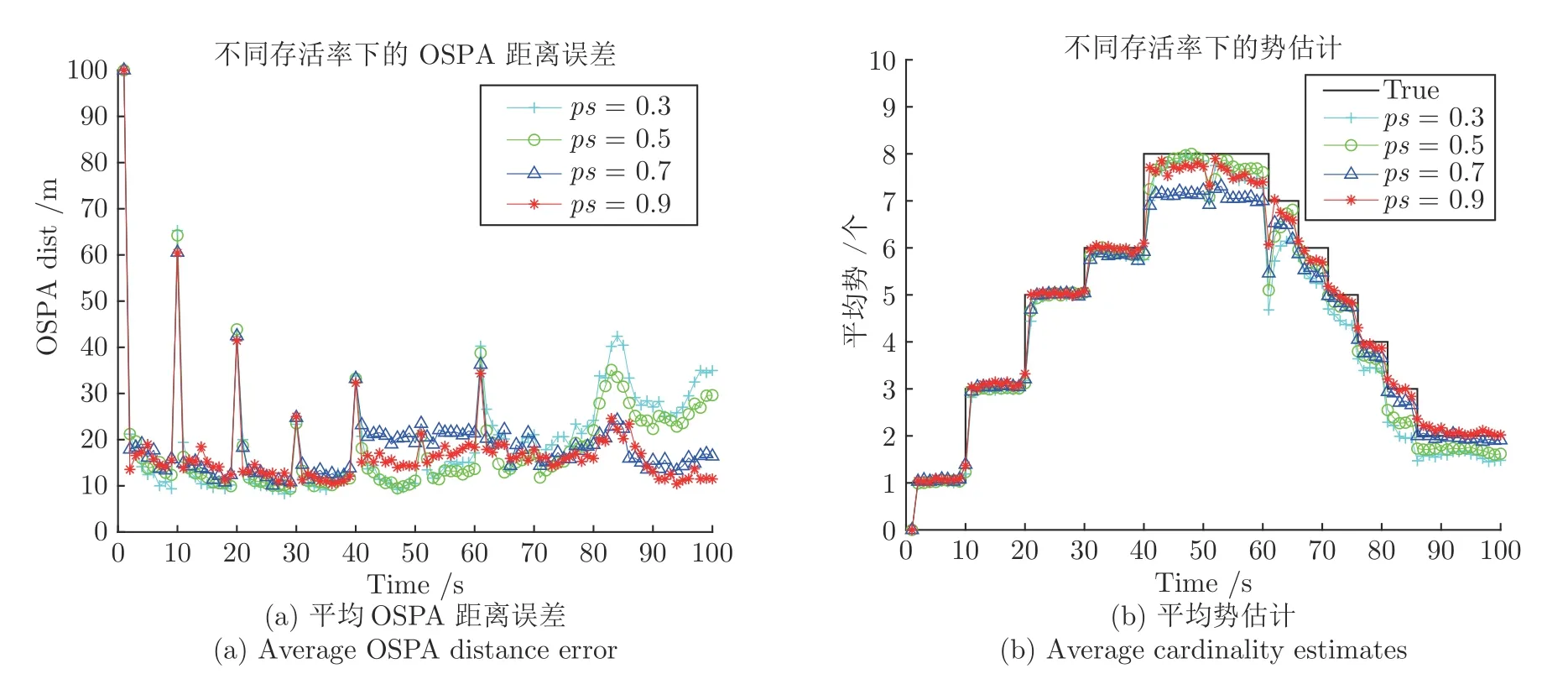
圖9 本文方法在不同存活率下的跟蹤性能Fig.9 The tracking performance of this paper under different survival rates1
圖10 是所提算法在不同檢測(cè)概率下的跟蹤性能對(duì)比圖,從圖10(a)可以看出檢概率越高跟蹤誤差越小,從圖10(b)也可以看出檢測(cè)概率越高勢(shì)估計(jì)更加準(zhǔn)確,當(dāng)檢測(cè)概率小于0.5 之后OSPA 誤差非常大且勢(shì)估計(jì)完全偏離.
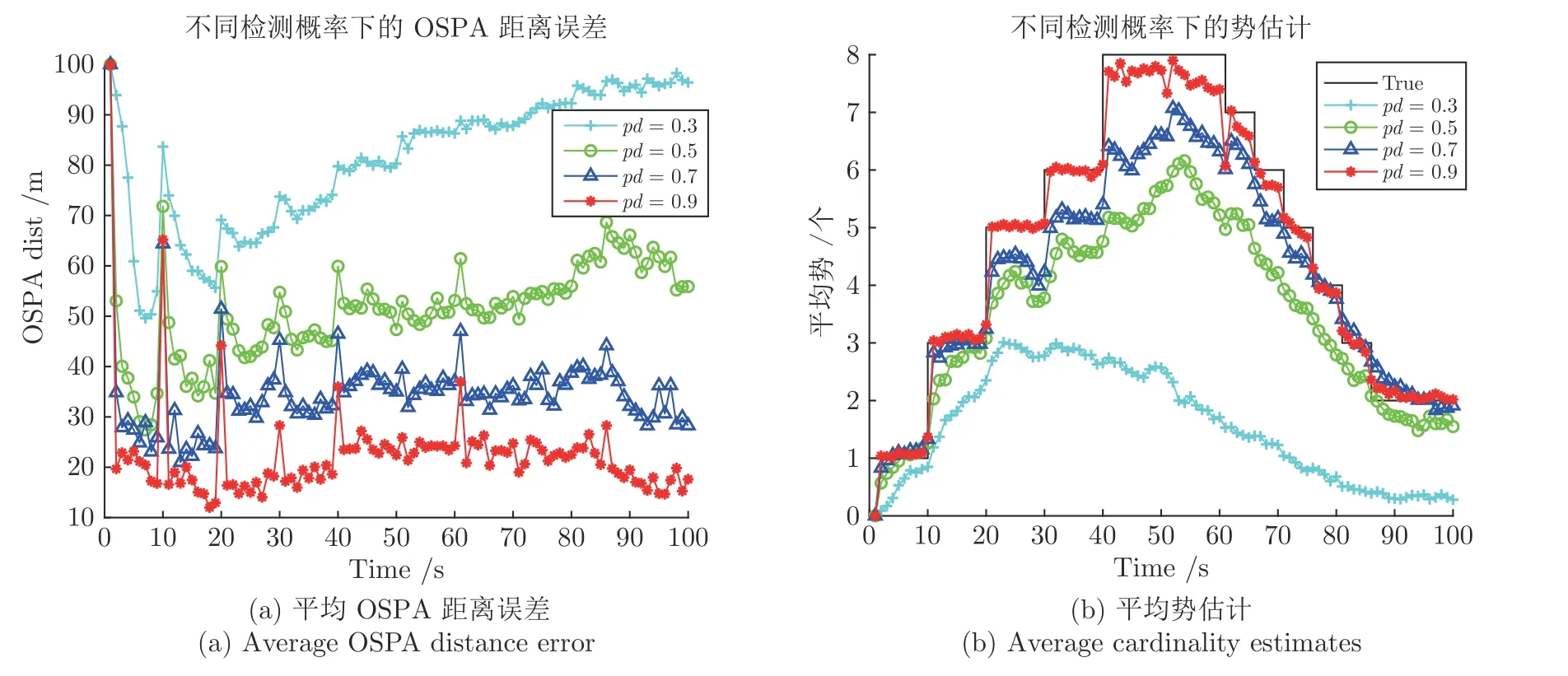
圖10 本文方法在不同檢測(cè)概率下的跟蹤性能Fig.10 The tracking performance of this paper under different detection probability
為了和另外兩種融合方法進(jìn)行對(duì)比,本文還對(duì)不同方法在不同存活率下和不同檢測(cè)概率下的TNOSPA 進(jìn)行統(tǒng)計(jì),結(jié)果如圖11 所示.
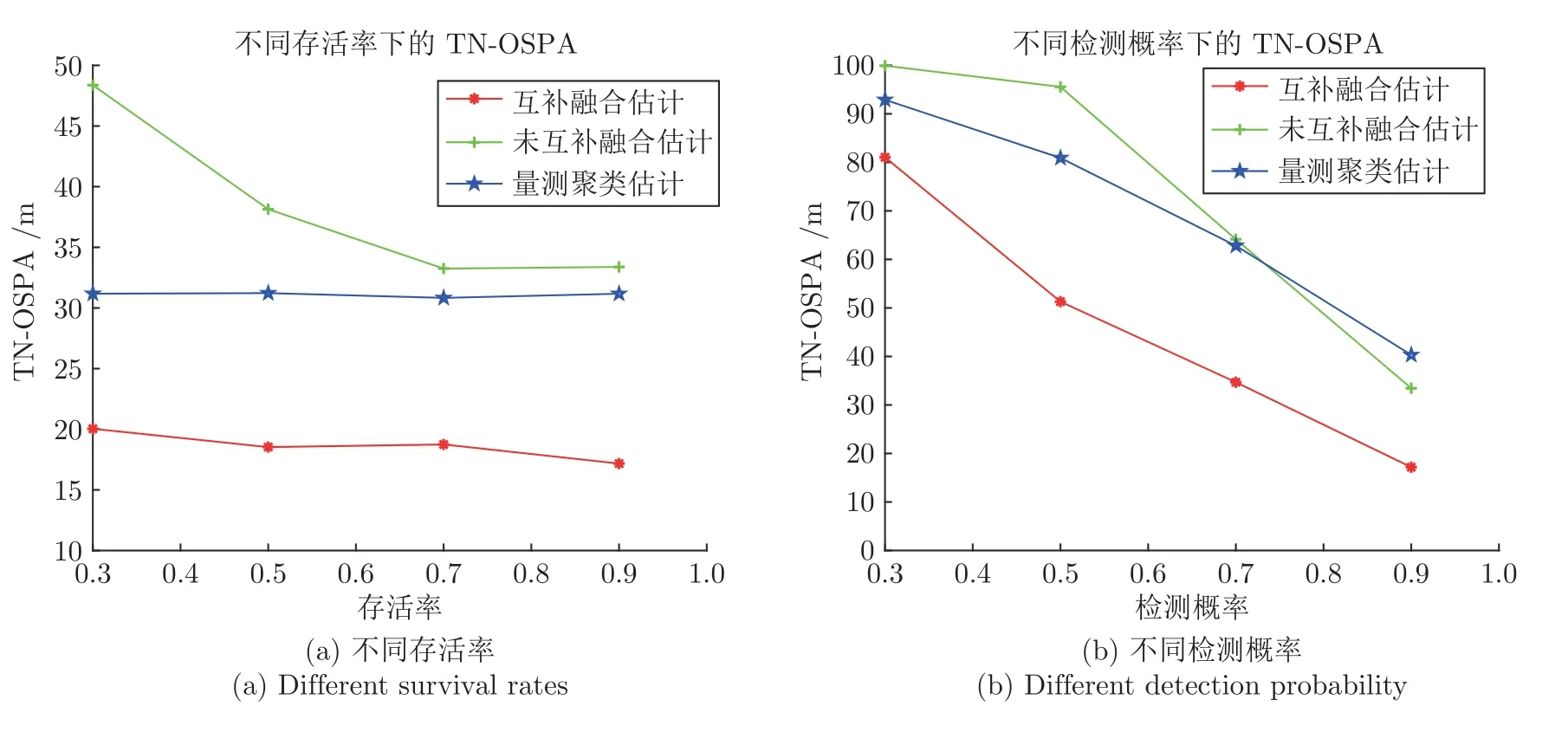
圖11 不同方法的 TN-OSPA 誤差統(tǒng)計(jì)圖Fig.11 TN-OSPA error statistics of different methods
從圖11(a)可以看出本文所提互補(bǔ)AA 融合方法在不同存活率下的誤差比較平穩(wěn),且優(yōu)于另外兩種方法,具有更好的跟蹤性能.從圖11(b)可知不同方法的跟蹤性能會(huì)隨著檢測(cè)概率的增大而提升,但本文方法始終優(yōu)于其他方法.這也表明本文所提方法具有跟蹤有效性和魯棒性.
5 結(jié)論
針對(duì)視場(chǎng)受限的分布式多傳感器網(wǎng)絡(luò)下的多目標(biāo)跟蹤問(wèn)題,本文提出了分布式視場(chǎng)互補(bǔ)多伯努利關(guān)聯(lián)AA 融合跟蹤方法,并通過(guò)SMC 方法實(shí)現(xiàn).通過(guò)仿真實(shí)驗(yàn)可知,視場(chǎng)互補(bǔ)方法比傳統(tǒng)的直接進(jìn)行量測(cè)共享方法的跟蹤性能更優(yōu),并且在計(jì)算效率上有顯著提升,再經(jīng)過(guò)多伯努利關(guān)聯(lián)AA 融合跟蹤,能進(jìn)一步提升跟蹤性能的穩(wěn)定性,使得勢(shì)估計(jì)更精確,OSPA 誤差更小.本文所提視場(chǎng)互補(bǔ)方法能夠克服有限感知網(wǎng)絡(luò)的融合難題,顯著提升跟蹤性能和提高計(jì)算效率.將本文的方法擴(kuò)展到更加一般的場(chǎng)景是未來(lái)需要考慮的工作,如更具有挑戰(zhàn)的動(dòng)態(tài)或異質(zhì)傳感網(wǎng)等.
猜你喜歡
中國(guó)光學(xué)(2021年6期)2021-11-25 07:48:32
工程數(shù)學(xué)學(xué)報(bào)(2020年3期)2020-07-06 07:38:40
長(zhǎng)治學(xué)院學(xué)報(bào)(2019年2期)2019-07-24 07:14:04
中國(guó)醫(yī)療設(shè)備(2019年1期)2019-01-15 12:10:54
雷達(dá)學(xué)報(bào)(2017年6期)2017-03-26 07:53:04
發(fā)明與創(chuàng)新(2016年5期)2016-08-21 13:42:46
課程教育研究·學(xué)法教法研究(2016年7期)2016-04-26 16:03:25
激光與紅外(2015年10期)2015-03-23 06:07:18
金陵科技學(xué)院學(xué)報(bào)(2014年1期)2014-03-15 03:29:00
華東理工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年5期)2014-02-27 13:49:31