
Fault-tolerant control with mixed aerodynamic surfaces and RCS jets for hypersonic reentry vehicles
2017-11-20 12:07:42HeJingjingQiRuiyunJiangBinZhaiRongyu
CHINESE JOURNAL OF AERONAUTICS 2017年2期
He Jingjing,Qi Ruiyun,Jiang Bin,Zhai Rongyu
College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China
Fault-tolerant control with mixed aerodynamic surfaces and RCS jets for hypersonic reentry vehicles
He Jingjing,Qi Ruiyun*,Jiang Bin,Zhai Rongyu
College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China
Control allocation;Fault-tolerant control;Hypersonic vehicles;Quantized control;Reaction control system(RCS)
This paper proposes a fault-tolerant strategy for hypersonic reentry vehicles with mixed aerodynamic surfaces and reaction control systems(RCS)under external disturbances and subject to actuator faults.Aerodynamic surfaces are treated as the primary actuator in normal situations,and they are driven by a continuous quadratic programming(QP)allocator to generate torque commanded by a nonlinear adaptive feedback control law.When aerodynamic surfaces encounter faults,they may not be able to provide sufficient torque as commanded,and RCS jets are activated to augment the aerodynamic surfaces to compensate for insufficient torque.Partial loss of effectiveness and stuck faults are considered in this paper,and observers are designed to detect and identify the faults.Based on the fault identification results,an RCS control allocator using integer linear programming(ILP)techniques is designed to determine the optimal combination of activated RCS jets.By treating the RCS control allocator as a quantization element,closed-loop stability with both continuous and quantized inputs is analyzed.Simulation results verify the effectiveness of the proposed method.
1.Introduction
Hypersonic vehicles traveling over Mach 5 have huge value in military affairs and civil transportation for their high speed and affordable space access.In recent years,there has been a rise in research interest toward modeling,1–3longitudinal control design,4–11and attitude control design12–15of hypersonic vehicles.
Actuator faults can cause performance degradation and even result in the failure of a specific aerospace mission.Therefore,strong fault tolerance capability is one of the key issues in the design of flight control systems.The problem of output tracking for linear uncertain systems in the presence of unknown actuator failures is solved using discontinuous projection-based output feedback adaptive robust control.16Ref.17proposes an adaptive robust approach for actuator fault-tolerant control for a class of uncertain nonlinear systems.Ref.18proposes a conceptually different approachto solve the problem of global stabilization for a chain of integrators in the presence of input saturation and disturbance.Fault-tolerant control has received considerable attention for its ability to enhance flight vehicle reliability and guarantee performance of longitudinal control systems19–26and attitude control systems.27–35A back-stepping design is used to control the longitudinal dynamics of hypersonic flight vehicles.21,22Actuator fault,input nonlinearity and saturation are thoroughly considered to ensure flight safety of hypersonic vehicles.23–25A review is given in Ref.26A robust servomechanism control approach and a quadratic programming based control allocation approach are investigated for reconfigurable flight control design of an X-33 vehicle subject to faults of the right and body flaps.27Simulations show the control allocation approach method is capable of providing uniformly better performance in all actuator fault cases considered in this paper.A sliding mode controller using a two-loop structure is proposed to obtain robust,decoupled tracking control of both orientation angle command pro files and angular rate command profiles in the presence of engine failure,bounded external disturbances and an uncertain matrix of inertia.28A direct fault-tolerant control technique that does not depend on explicit fault detection is presented for reusable launch vehicles based on the singular perturbation concept.29An adaptive actuator fault compensation scheme is developed forattitude dynamicmodeling ofnearspacevehicles(NSV).31A new feature of this paper is the adaptation of plant parameter estimates together with those of the fault pattern parameter for direct adaptive actuator fault compensation without explicit fault detection.Xu et al.32proposed a fast robust asymptotic fault accommodation algorithm for reentry NSVs and designed a constrained fault tolerant control(FTC)for reentry NSVs based on sliding mode,command filter,and backstepping techniques.33Fuzzy logic control,34dynamic terminal sliding mode control,35and multi-mode adaptive control36techniques have also been applied to fault-tolerant control design of hypersonic vehicles.
Due to low dynamic pressure at the beginning stages of reentry,aerodynamic surfaces are usually too weak to satisfy control commands.Thus,hypersonic vehicles are typically equipped with reaction control systems(RCS)for attitude control.An RCS consists of jets that can be fired to produce pitching, rolling and yawing moments. Compared with conventional surfaces,which can produce continuous forces and moments when operated within rate and position limits,the moments produced by RCS are discrete.Methods for blending RCS and continuously variable control surfaces have been proposed.Zhang et al.37developed an optimal control selection allocation algorithm,which deploys control torque commands into the actuators composed of aerodynamic surfaces and RCS.Qian et al.38proposed a multi-model switching control scheme based on a T-S fuzzy model to derive the desired control torque.Liang et al.39proposed a modified phase plane method for control of hypersonic reentry vehicles driven by RCS.The phase-plane method is the traditional choice for distinct input systems where multi-axis coupling is weak.However,multi-axis coupling is usually very strong in actual flight;Therefore,such methods become ineffective,and pulse width modulation(PWM)technology is often employed to design controllers.40,41These treat the RCS jets as continuous effectors by using PWM to vary the jet duty cycle.A mixed-integer linear programming formulation of the RCS mixing problem is designed to be daisy-chained with a linear programming(LP)solution for the aerosurface control allocation problem.42–44An optimization control allocation algorithm using linear programming and a pulse-width pulsefrequency(PWPF)modulator are designed to allocate torque for all aerodynamic surfaces and on-off switching-states of RCS jets.45
In practical application,when abrupt faults occur in actuators at the beginning stages of reentry,it is difficult to accommodate the fault effects through aerodynamic surfaces only since the remaining healthy aerodynamic surfaces are weak and easily saturated when the vehicles are transiting from exoatmospheric to endoatmospheric flight.In such situations,RCS must be fired to compensate for the effects of aerodynamic surface faults.As mentioned before,there have been many resulting fault-tolerant control designs using only aerodynamic surfaces.When dynamic pressure is suff icient and aerodynamic surface faults are not very severe,those approaches can be very effective.The RCS needs to work together with aerodynamic surfaces to make sure enough torquecan beprovided to achievethefaulttolerant goal.However,to the best of the authors’knowledge,there are few results in existing research that consider fault-tolerant control design using both aerodynamic surfaces and RCS.
In this paper,we address the issue of actuator fault-tolerant control design by blending aerodynamic surfaces and RCS for hypersonic reentry vehicles.The desired torque is generated by a nonlinear adaptive feedback control law and is allocated to aerodynamic surfaces,which are treated as the primary actuator,using quadratic programming(QP).A fault detection and identification unit is employed to provide information on aerodynamic surface faults(partial loss of effectiveness or stuck occurrence)based on which an RCS control allocator using integer linear programming(ILP)can be designed to properly fire the RCS in order to minimize the impact of aerodynamic faults,achieve the desired control torque and recover control performance.Our work was mainly inspired by Ref.43,which proposed a mixed-integer linear programming approach to combine continuous and pulsed control effectors.However,faults are not considered in Ref.43;our paper addresses aerodynamic surface faults and designs a fault-tolerant control allocator,in conjunction with a fault detection and identification unit,that uses RCS to compensate for the impact of surface faults.Furthermore,our paper designs an RCS allocator to deliver quantized approximations of nonlinear control laws for nonlinear plants;Ref.43only considers quantized approximations of linear control laws for linear time-invariant plants.Finally,our paper conducts a stability analysis for the quantized nonlinear feedback control law acting on a nonlinear plant while Ref.43applies the Lyapunov theory to determine the region of attraction for a quantized linear feedback control law acting on a linear time-invariant plant.
The rest of the paper is arranged as follows:The attitude dynamics for hypersonic reentry vehicles,RCS jets and the actuator dynamics modeled by a second-order system are presented in Section 2.Attitude control based on control allocation is presented in Section 3.Fault tolerant control for hypersonic vehicles subjected to stuck faults and loss of effectiveness faults is presented in Section 4.Stability analyses of quantized control is given in Section 5,and simulation studies are carried out in Section 6.
2.Attitude dynamic model
The dynamic equation for the orientation dynamics and rotational motion of a hypersonic vehicle in its reentry mode are given as12

Assumption 1.The disturbance torquesdi(i?1;2;3),have the following form

Remark 1.By properly selecting the basis functions gi;jetT,the model in Eq.(3)is capable of representing a great variety of disturbances.
The control torque T consists of two parts:

where Tdrepresents the torque generated by aerodynamic surfaces and TRCSrepresents the torque generated by RCS jets.
Aerodynamic surfaces.The aerodynamic torque Tdis described as follows:



Reaction Control Systems(RCS).RCS are force-producing devices that only have two states:on and off.Each jet is capable of producing pitching,rolling and yawing moments when fired.There are 2mtorque combinations that can be achieved when the vehicle is equipped withmjets.For this paper,it is assumed that the vehicle is equipped with 10 ideal jets,i.e.,RCS jets produces a force vector with no delay,and the torque produced by RCS is considered to be constant.43The vector of RCS torque TRCSis defined as


Specifically,Lrcs?TRCS1,Mrcs?TRCS2andNrcs?TRCS3are the roll,pitch and yaw torques,respectively.


3.Attitude control
In this section,we first design a torque controller to produce the desired torque Tdes,which can force c to track cdin the presence of external disturbances.Control allocation techniques based on QP and ILP are then employed to determine how the actual actuators,i.e.aerodynamic surfaces and RCS,should work to generate control torque that follows Tdesas closely as possible.
3.1.Torque controller design
From Eq.(1),we can see that the torque T directly controls the angular rate x and x affects the attitude angle c.To make c track the desired attitude angle cd,the desired angular rate for x can be designated as

wherec2>0 is a design parameter.
Substituting Eq.(8)into Eq.(1)yields




i




The parameter adaptive law for estimating^h is designed as

wherec4is a positive constant.

The derivative of Eq.(17)along the attitude dynamics,Eq.(1),is
Applying xdin Eqs.(8)–(18),we obtain

Substituting Eq.(13)into Eq.(18)yields

With Eq.(15),we have

Substituting the parameter adaptive law Eq.(16)into Eq.(19)yields




3.2.Torque distribution
In this section,control allocation is used to distribute the derived torque command Tdesto aerodynamic surfaces and RCS jets.Aerodynamic surfaces are treated as the primary actuator and RCS jets as the auxiliary actuator.Firstly,aerodynamic surfaces driven by a QP allocator are activated to achieve the desired moment Tdesfor maintaining tracking.Then,if the aerodynamic surfaces are saturated or faults occur making some of them unable to supply the moment Tdes,RCS jets are activated to assist.An RCS allocator is designed to deliver the residual desired moment as closely as possible.The RCS firing solution is determined by the solution to the ILP problem.Fig.1 shows a block diagram of the overall control structure.
3.2.1.QP based control allocation


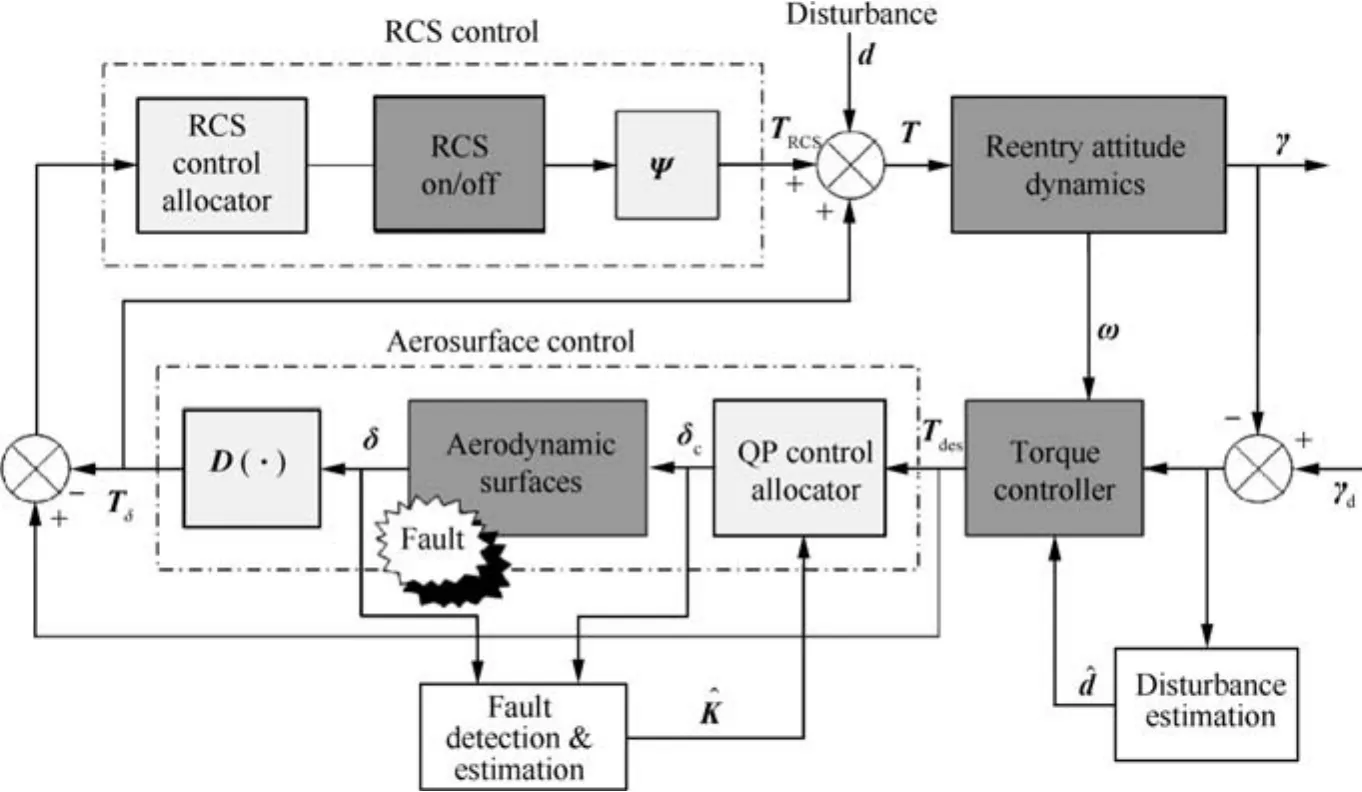
Fig.1 Overall control structure.

3.2.2.Integer linear programming


subject to
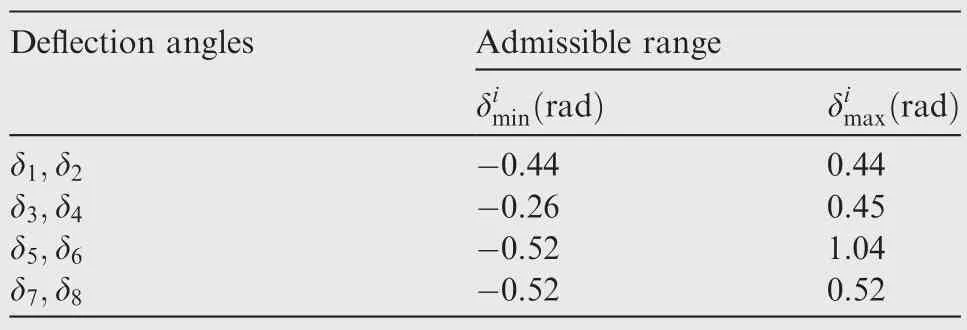
Table 1 Admissible ranges for aerodynamic surfaces.12
4.Fault-tolerant attitude control design
Two types of aerodynamic surface faults are considered in this paper:loss of effectiveness(LOE)and stuck faults.When a stuck fault happens,the aerodynamic surface is jammed in some fixed position and cannot be influenced by control actions.An LOE fault leads to less aerodynamic surface deflection for a given command signal than non-fault cases.Models of the two types of faults are given in the following section.
4.1.Fault modeling
4.1.1.LOE faults
In the presence of an LOE fault,the surface dynamics,Eq.(6),are changed into the form

4.1.2.Stuck faults


4.2.Fault detection and identification
In this section,fault detection is developed to play a triggering role,which can be seen as a 0–1 switch.Fault estimation is then designed for different types of actuator faults,and fault identification for different fault types is proposed.
4.2.1.Fault detection
In order to detect actuator faults,we designivirtual actuators as

4.2.2.Fault estimation for LOE and stuck faults
To estimate values for loss of effectiveness,a group of observers are designated as follows:

From Eqs.(27)and(30),the error dynamics have the following form:


where

The following Lyapunov function is chosen:



wherec1>0;p12andp22are the first and second elements in the second column of P,such that

From Eq.(37),we obtain

Next,the estimator for stuck faults is designed.The dynamics of theith estimator can be described as

4.2.3.Fault identification for different fault types
A decision-making mechanism is used to distinguish fault type,and is implemented by the following performance indices:
4.3.Fault tolerant control design
In this section,fault tolerant control strategies for LOE and stuck faults are proposed.
4.3.1.Fault tolerant control design for LOE faults




4.3.2.Fault tolerant control design for stuck fault



If the remaining healthy aerodynamic surfaces cannot compensate for the effect caused by the faulty surface,RCS are activated to assist.The residual moment will be distributed to RCS jets through the ILP-based allocator as described in Section 3.2.2.
5.Stability analysis of quantized control
The stability of the attitude dynamics under continuous control torque produced by aerodynamics has been well established.Here,we consider that the control torque is generated by both aerodynamic surfaces and RCS.Instead of generating continuous control torque,RCS jets act as pulsed control effectors that are only capable of providing a finite number of distinct control torques.When the aerodynamic surfaces cannot provide enough desired torque,the RCS allocator worksto distribute the residualdesired torque vector Te? ?Le;Me;Ne?Tas closely as possible without any element of the RCS torque vector exceeding the magnitude of any element of Te.In this way,the RCS allocator transforms continuous torque command vectors into quantized control vectors as a quantization element,or equivalently,a quantizer.
Before we start to analyze the stability of the closed-loop system under quantized RCS control,we will first introduce the quantizer used in this paper.
5.1.Quantizer
Consider a variablezto be quantized and a piecewise constant functionqe?T as the quantizer;It is assumed that there exist positive real numbersKand D such that the following two conditions hold:46

whereKand D are referred to as the range ofqand the quantization error,respectively.The quantizer used in this paper is of the form:

where Z is a set of nonnegative integers.
5.2.System stability with input quantization

where DLe,DMeand DNeare quantization errors forLe,MeandNe,respectively.
Define the torque quantization error

According to Eq.(48),e satisfies



With Eq.(53),the tracking error dynamics of~c and~x under quantized control become


The derivative of the Lyapunov function,Eq.(55),is calculated as

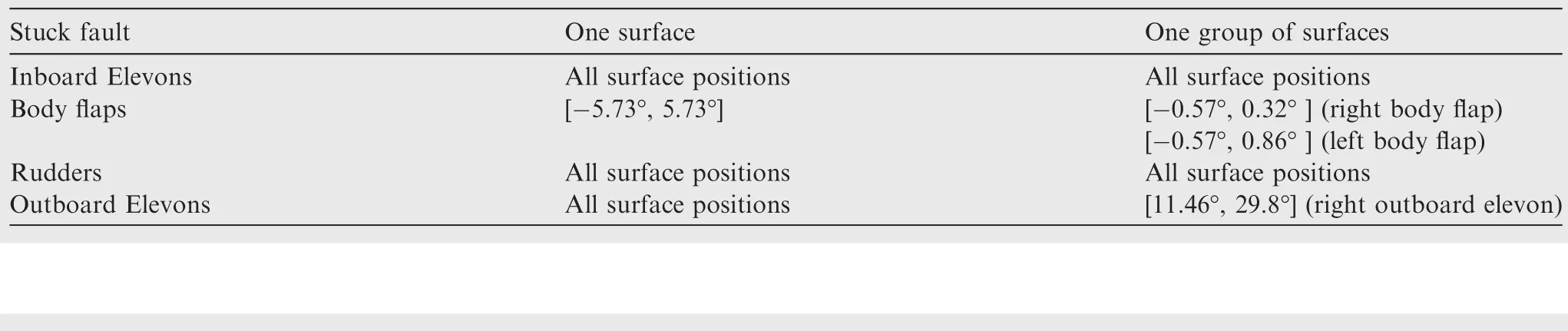
Table 2 Surface fault accommodation.

Table 3 Surface fault accommodation(two groups are stuck).
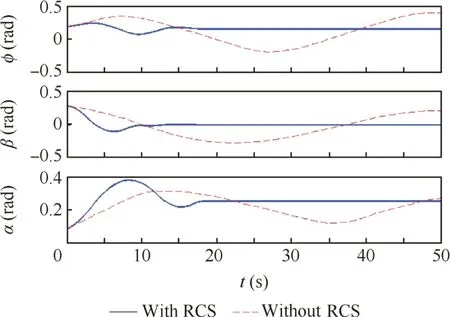
Fig.2 Attitude angle tracking responses in Case 1.
Substituting Eq.(54)into Eq.(56)yields

Then,with the control torque designed in Eq.(13)and the parameter adaptive law Eq.(16),we have
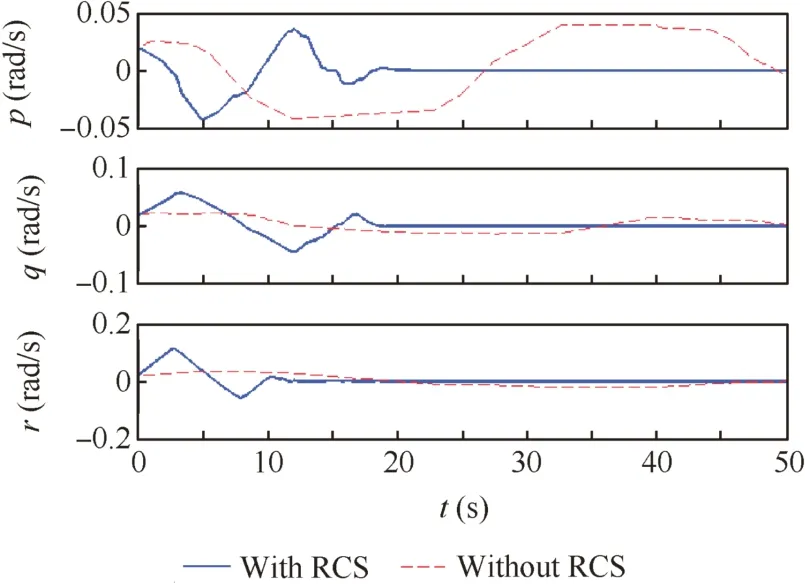
Fig.3 Roll,pitch and yaw rate responses in Case 1.

Combining Eqs.(51)and(56)yields

Define a ball



From the above Lyapunov based stability analysis,we can conclude that for the nonlinear attitude dynamics under continuous control signals produced by aerodynamic surfaces and quantized control signals produced by RCS jets,closedloop stability can be guaranteed outside a ball centered at the origin of the tracking error state space.No conclusive stability results can be drawn when the system operates inside the ball.The size of the ball can be reduced by using an optimal controlallocation algorithm to minimizethedifference between the residual desired torque and the torque produced by RCS jets and also reduce quantized error.
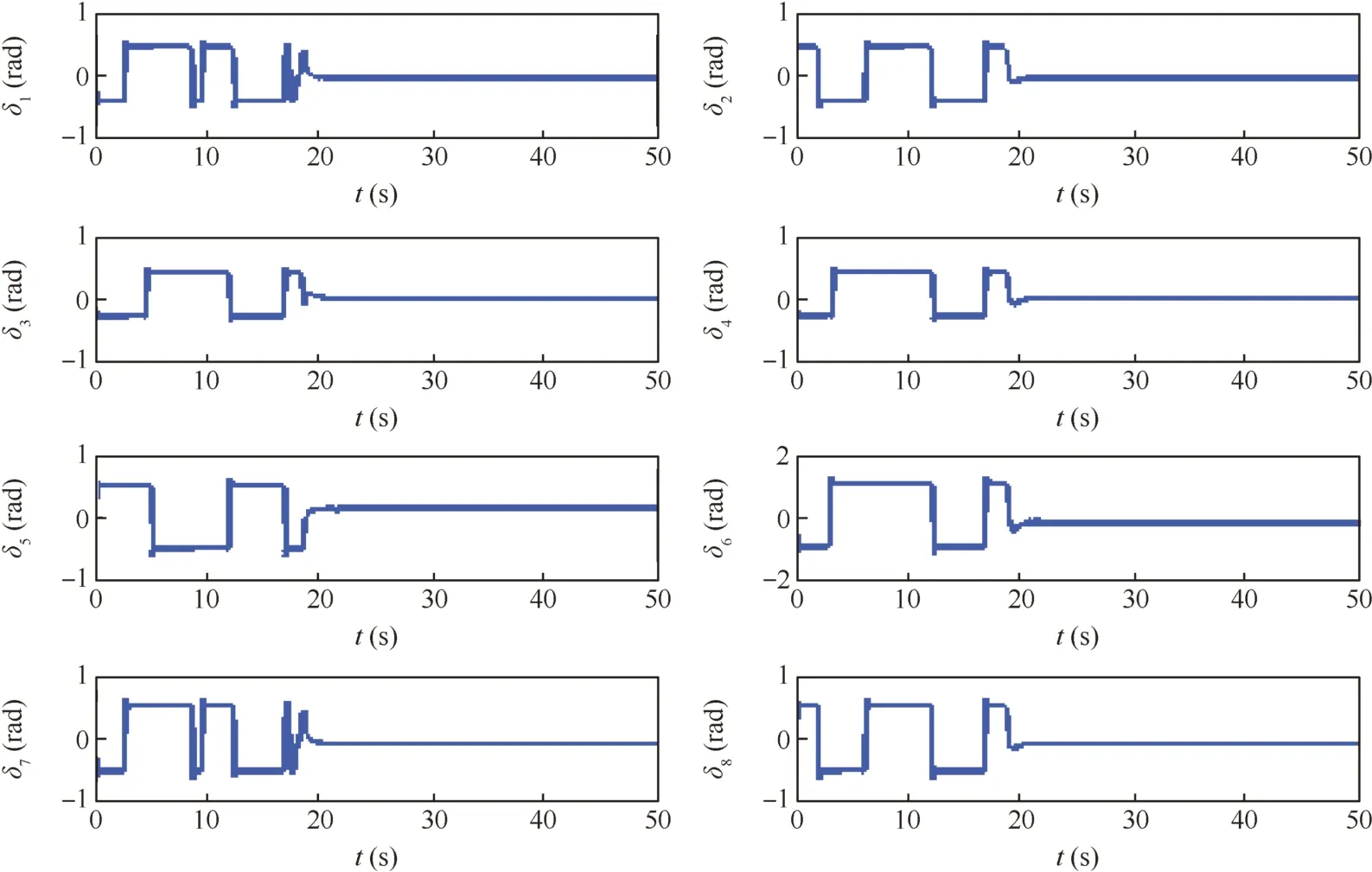
Fig.4 Deflection angles of aerodynamic surfaces in Case 1(with RCS).
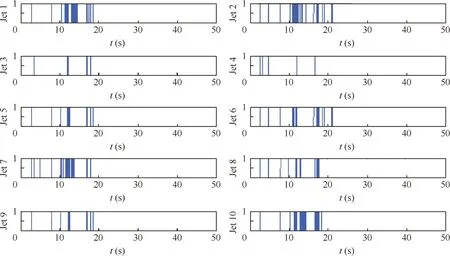
Fig.5 RCS on/off states in Case 1.
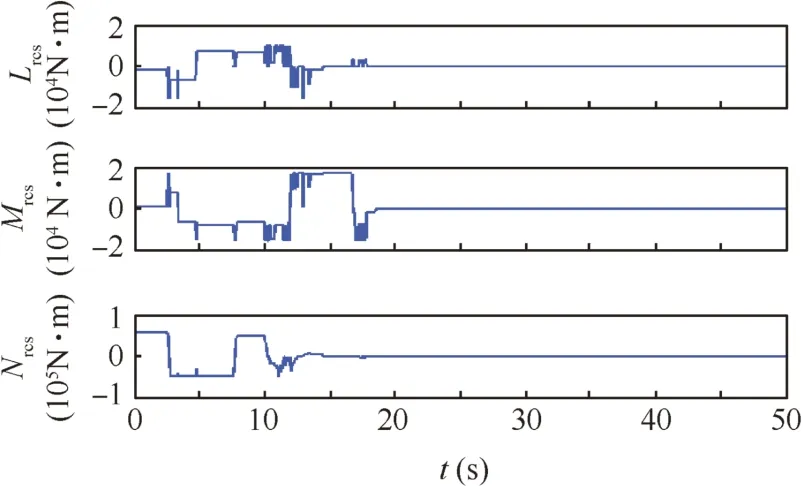
Fig.6 Torques provided by RCS in Case 1.
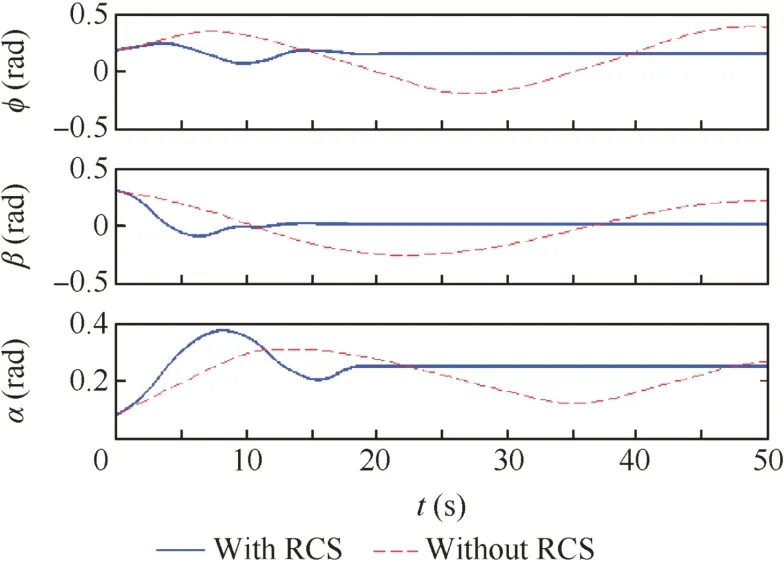
Fig.7 Attitude angle tracking responses in Case 2.
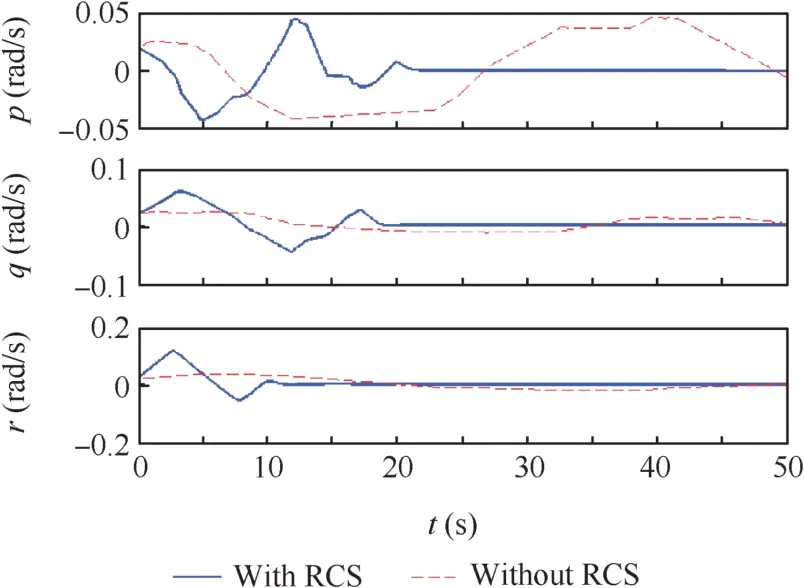
Fig.8 Roll,pitch and yaw rate responses in Case 2.
6.Simulation study
In this section,simulations are set up to verify the effectiveness of our proposed method.Results from four different cases are provided:Case 1–no fault;Case 2–LOE fault on the right inboard elevon;Case 3–stuck fault on the right body flap;Case 4–stuck faults on both the right inboard elevon and the right body flap.Extensive simulations are also carried out for different fault situations and on whether failed surfaces can be compensated for by the remaining healthy surfaces(without RCS).The results are summarized in Tables 2 and 3.
The parameters of the inertia matrix J in Eq.(1)are as follows:



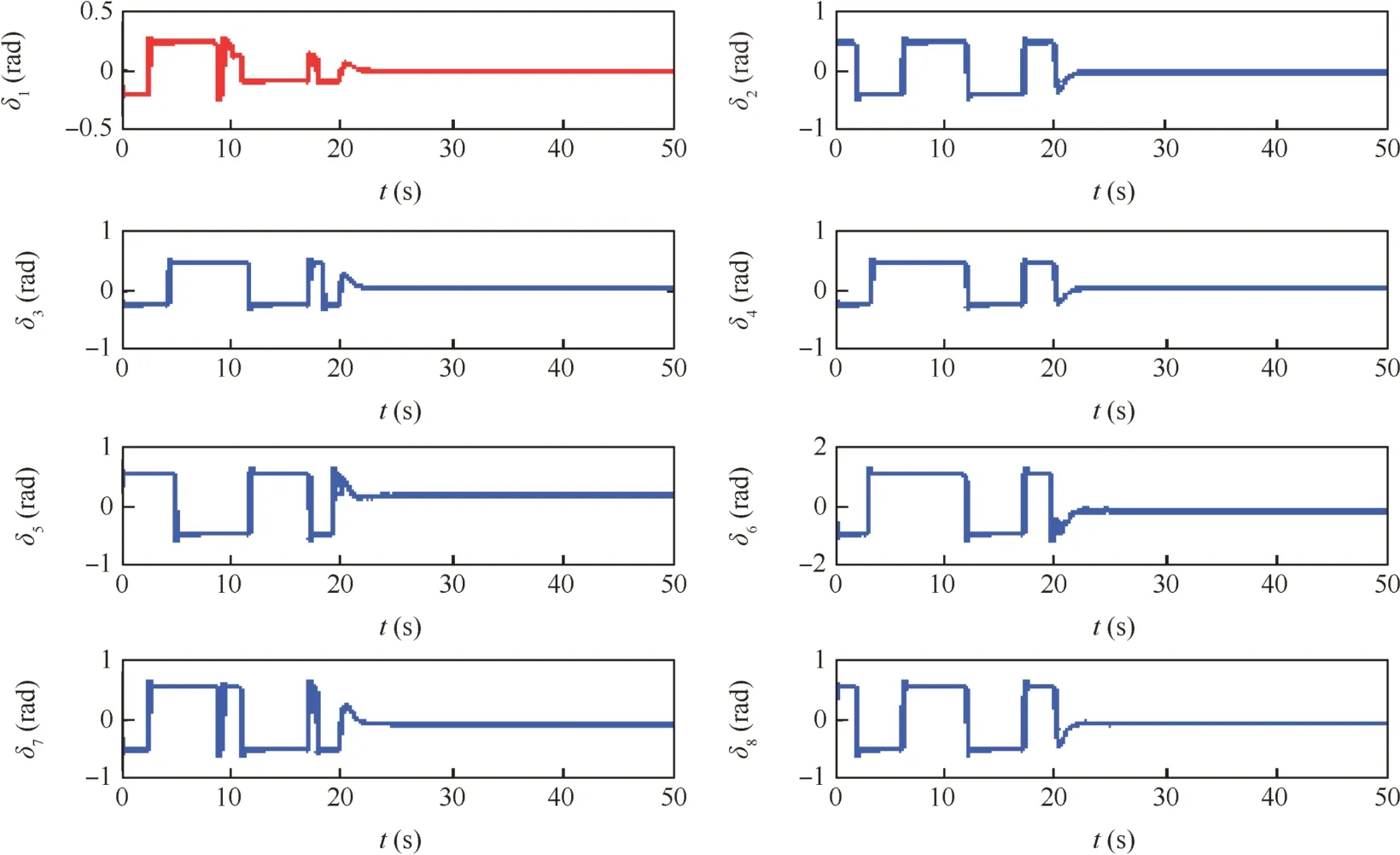
Fig.9 Deflection angles of aerodynamic surfaces in Case 2(with RCS).
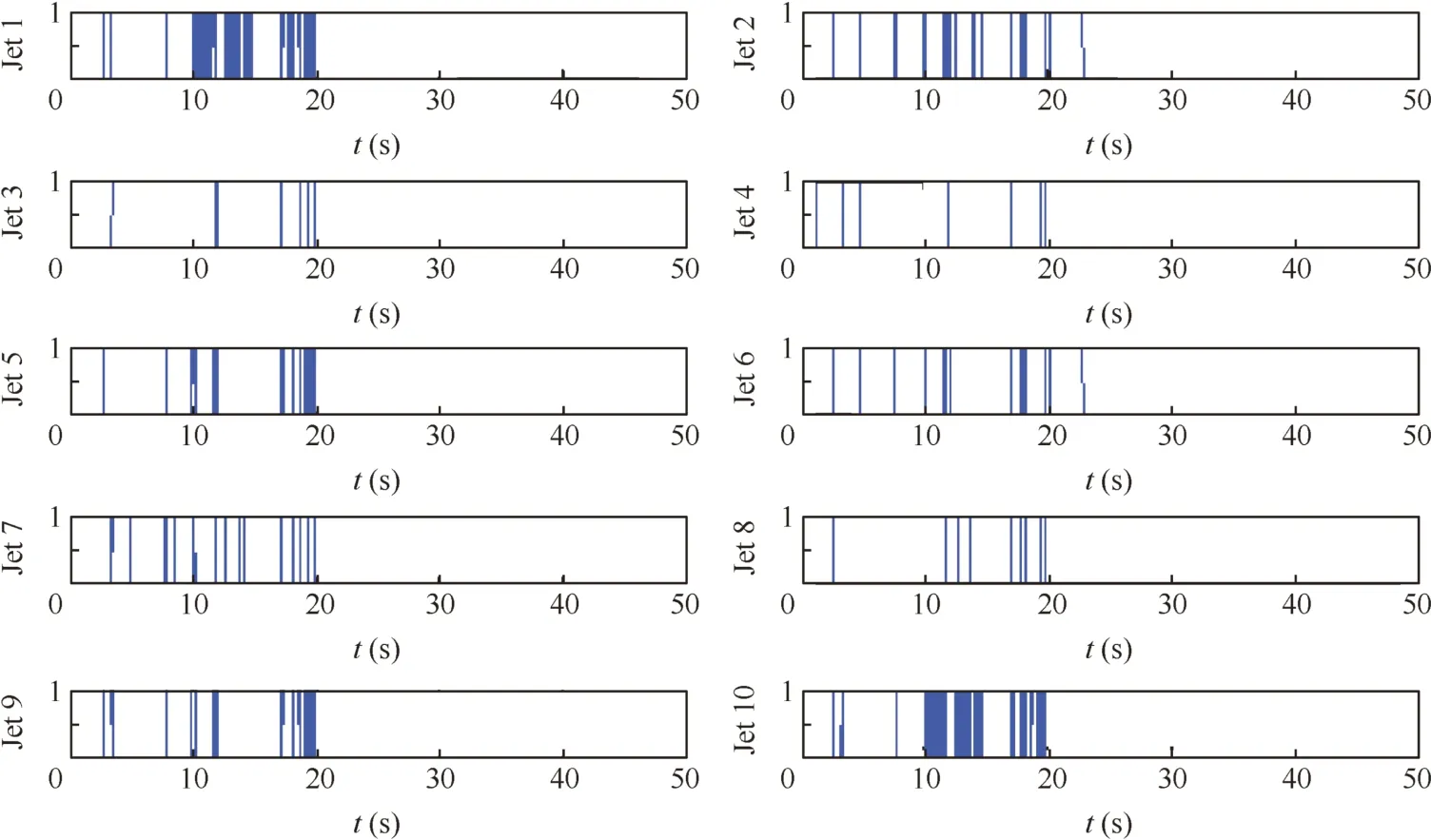
Fig.10 RCS on/off state in Case 2.
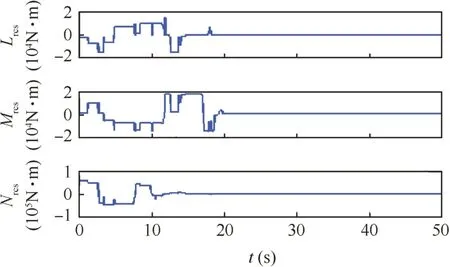
Fig.11 Torques provided by RCS in Case 2.

Case 1.No fault.The results are shown in Figs.2–6.Figs.2 and 3 show a time history comparison between non-RCS and RCS-equipped models.It is obvious that the tracking performance of the RCS-equipped system is much better as the attitude angle can track the desired command within almost 20 s.From Figs.4 and 5,it can be seen that the RCS jets operate when the aerodynamic surfaces are saturated.
Case 2.The right inboard elevon encounters a 50%LOE fault.The simulation results are shown in Figs.7–12.It can be seen from Figs.7 and 8 that all the state variables are bounded even when the right inboard elevon loses 50%effectiveness.Fig.9 shows the deflection angles of the eight aerodynamic surfaces.In Figs.10 and 11,the on/off states of RCS jets and the torque provided by RCS jets on each axis are presented.In Fig.12,estimations for the values of the loss of effectiveness are shown.
Case 3.The right body flap is subjected to a stuck fault at 1 s.The simulation results are shown in Figs.13–17.As seen in Fig.13,the tracking performance is much better when the vehicle is equipped with RCS jets.Fig.14 shows the roll,pitch and yaw responses during the stuck fault.Fig.15 shows the deflection angles of aerodynamic surfaces,and Fig.16 presents the on/off state of RCS jets.Fig.17 gives the torques generated by RCS.
Case 4.The right inboard elevon and the right body flap are stuck at 1 s.Simulation results for the vehicle equipped with RCS jets are shown in Figs.18–22.An obvious improvement in the attitude angle tracking performance is observed when these results without RCS are compared with those obtained with RCS jets,as shown in Fig.18.Fig.19 shows the angular rate responses with RCS which are smooth and desirable.Figs.20 and 21 show the deflections of aerodynamic surfaces and the states of the RCS jets,respectively.Fig.22 represents the torque provided by the RCS jets.
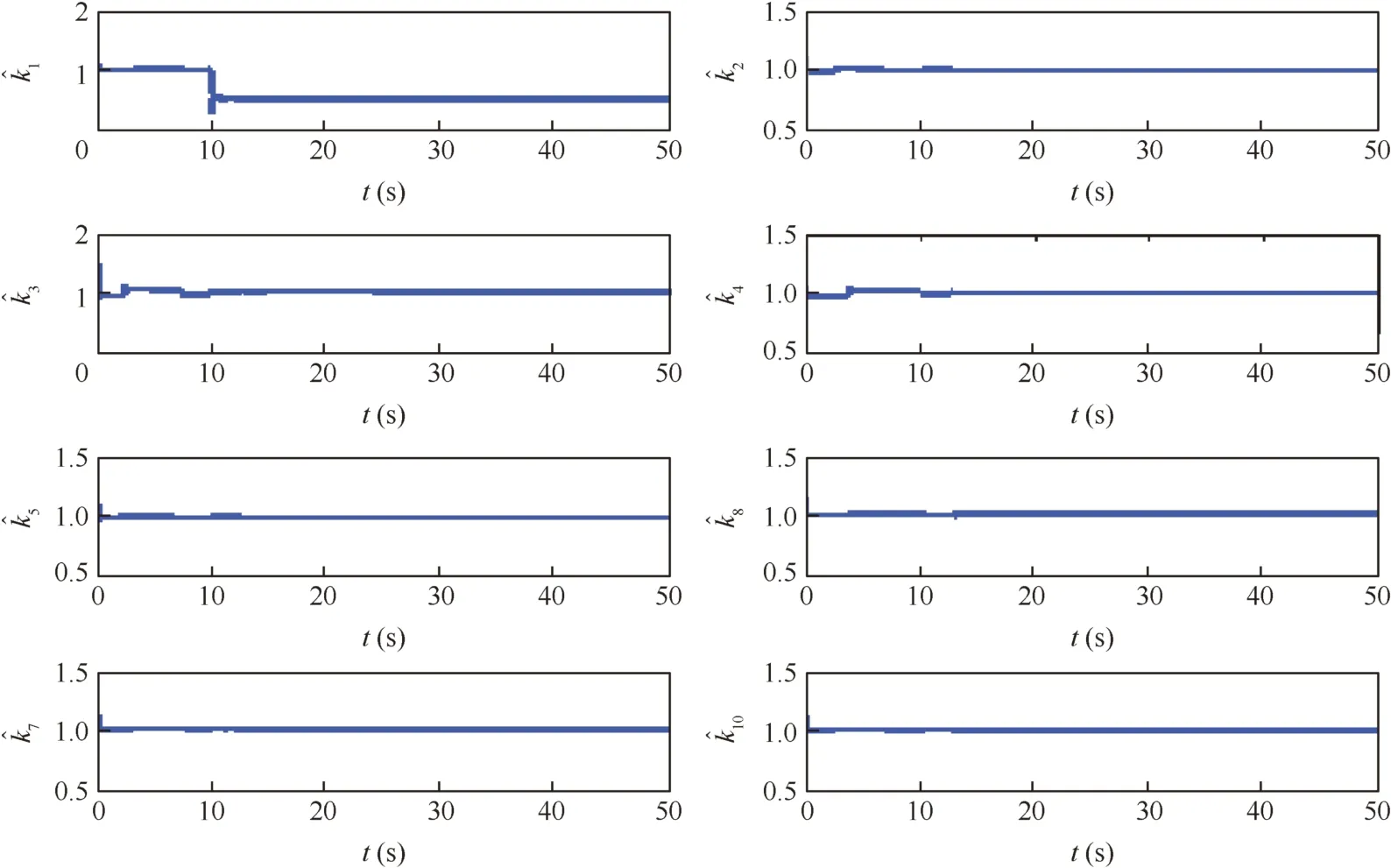
Fig.12 Estimations for LOE in Case 2(with RCS).
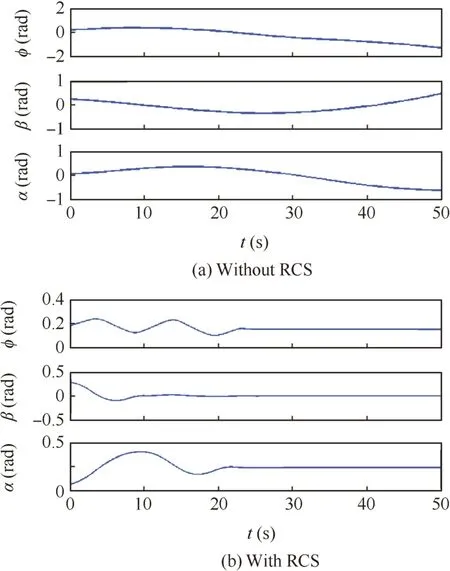
Fig.13 Attitude angle tracking responses without and with RCS in Case 3.
Remarks:If the faults happen quickly,i.e.successive loss of efficiency,this could give rise to transients and deteriorated transient responses,but the stability of the vehicle can still be guaranteed when enough control authority exists.The overall fault-tolerant design is based on the system having redundancy in its actuators.The degrees of freedom for the attitude control system is three,which means the number of independent control variables should be at least three to provide enough control authority.However,due to constraints on each surface deflection angle,not all surface failures can be accommodated,even when the number of remaining healthy surfaces is not less than three.In addition to the above four cases,we have carried out extensive simulations on different fault situations and determined whether the failed surfaces can be compensated by the remaining healthy surfaces(without RCS).The results for cases where one surface or one group of surfaces are stuck are summarized in Table 2,and the results for those cases with two groups of surfaces stuck are summarized in Table 3.
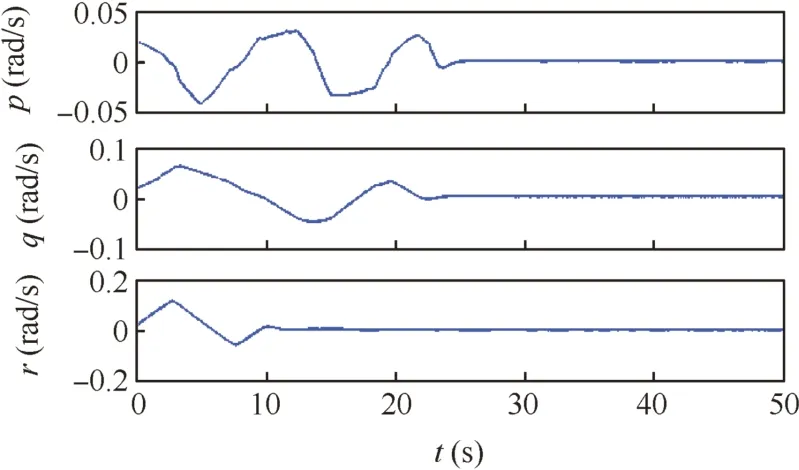
Fig.14 Roll,pitch and yaw rate responses in Case 3(with RCS).
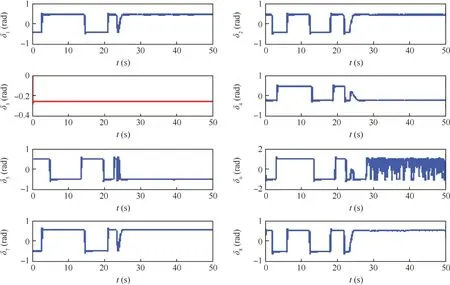
Fig.15 Deflection angles of aerodynamic surfaces in Case 3.
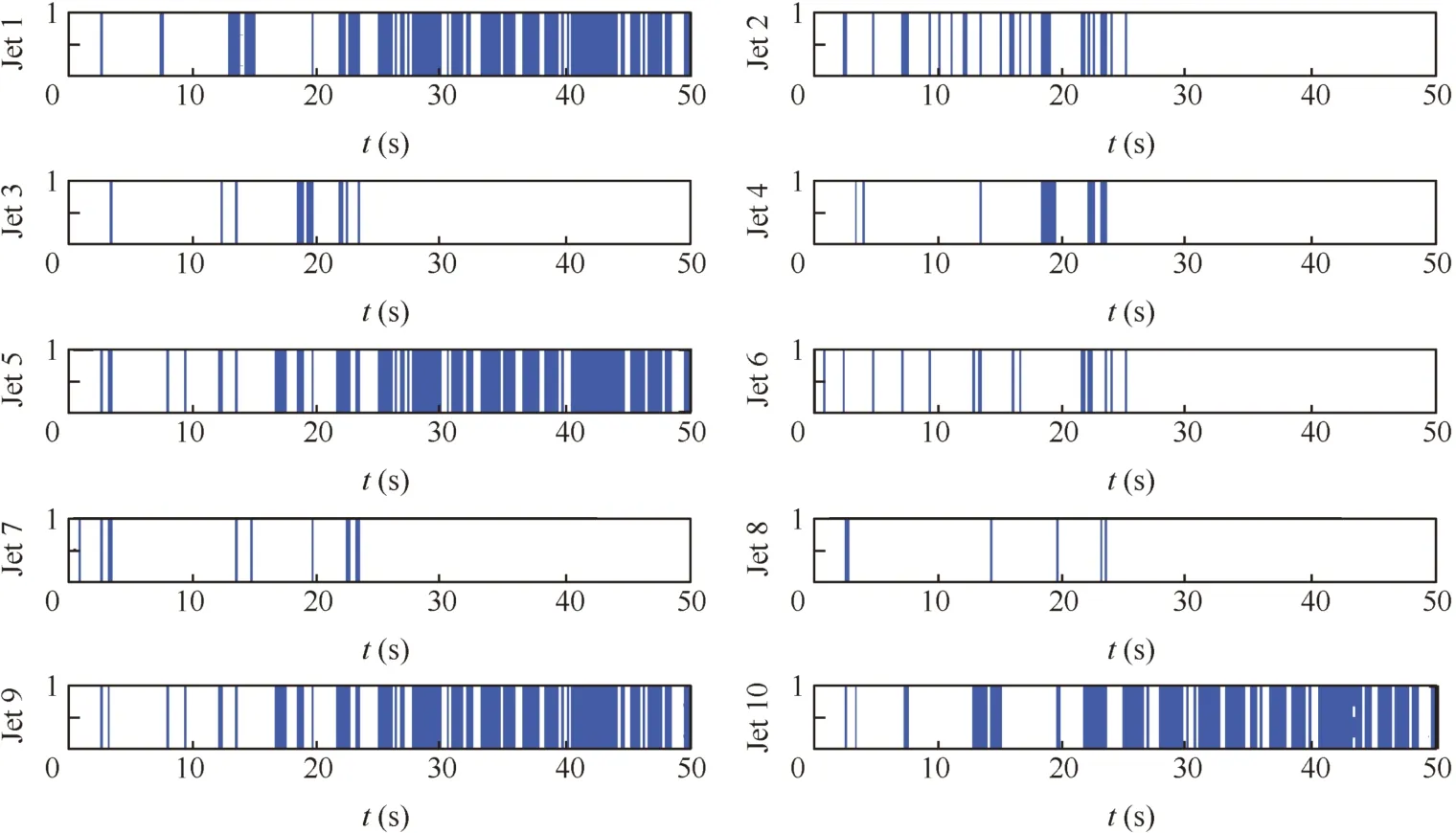
Fig.16 RCS on/off states in Case 3.
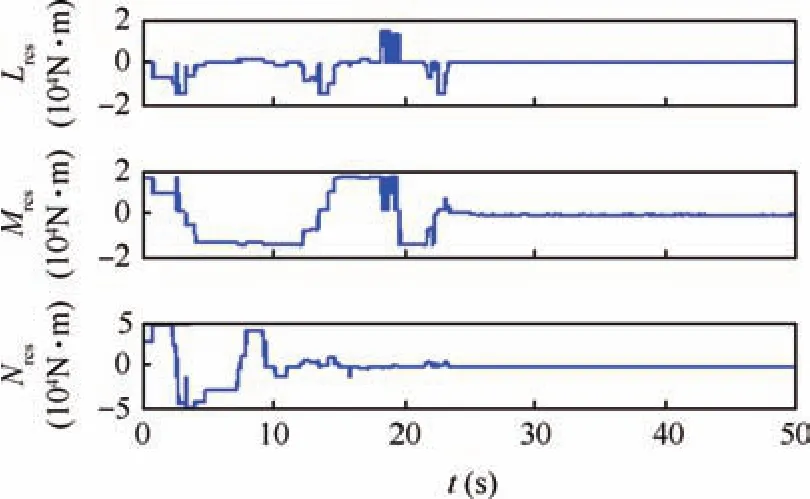
Fig.17 Torques provided by RCS in Case 3.
From Tables 2 and 3,it can be seen that when stuck faults occur in aerodynamic surfaces,not all the stuck positions can be compensated for by the remaining healthy surfaces.In many cases,some aerodynamic surfaces are must be stuck within a certain range for fault accommodation to be possible.In some extreme cases,such as when both inboard elevons and outboard elevons are stuck,fault accommodation by other healthy aerodynamic surfaces cannot be achieved.In those circumstances,fault accommodation can still be achieved with the help of RCS.
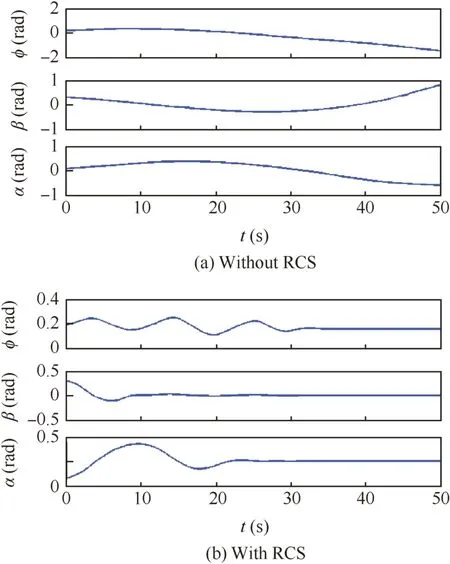
Fig.18 Attitude angle tracking responses without and with RCS in Case 4.
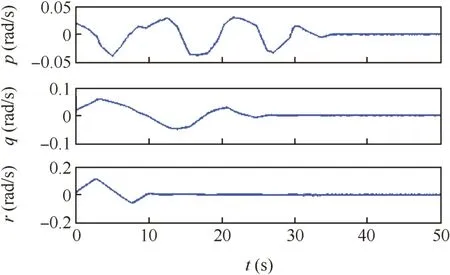
Fig.19 Roll,pitch and yaw rate responses in Case 4(with RCS).
7.Conclusions
(1)Aerospace vehicles are usually equipped with different types of actuators to allow for some control redundancy.Those actuators need to cooperate well under normal conditions to achieve desired control performance and,more importantly,to ensure the safety of the vehicle when some actuators are subject to faults.Due to low dynamic pressure at the beginning of the reentry phase,aerodynamic surfaces usually cannot work efficiently,and RCS are needed to assist the aerodynamic surfaces and improve the control performance.When faults occur on some aerodynamic surfaces and the remaining healthy surfaces cannot provide enough torque,RCS must be activated to compensate for the effects caused by the surface faults.
(2)Since aerodynamic surfaces can provide continuous torque and RCS are only capable of providing a finite number of distinct torques,aerodynamic surfaces are treated as the primary actuator and RCS as complementary actuator.This paper proposes a QP-based continuous allocator for aerodynamic surfaces and an ILP-based allocator for RCS,a novel control allocation based fault-tolerant control method that includes a faultdetection and identification unit to reveal and estimate actuator faults.By treating RCS torques as quantized control signals,closed-loop stability analysis found that a guaranteed domain of attraction can be achieved with blended continuous control and quantized control for a nonlinear attitude control system.
(3)The effectiveness of the proposed fault-tolerant control method has been demonstrated through extensive simulation studies.However,we also found the current QP plus ILP controlallocation method was timeconsuming,and the on/off switches of RCS were frequent.Further research should focus on how to design more computationally efficient control allocation algorithms and how to reduce the switching frequency of RCS.
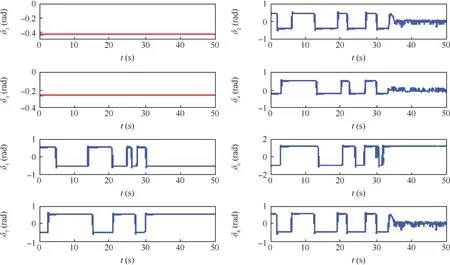
Fig.20 Deflection angles of aerodynamic surfaces in Case 4.
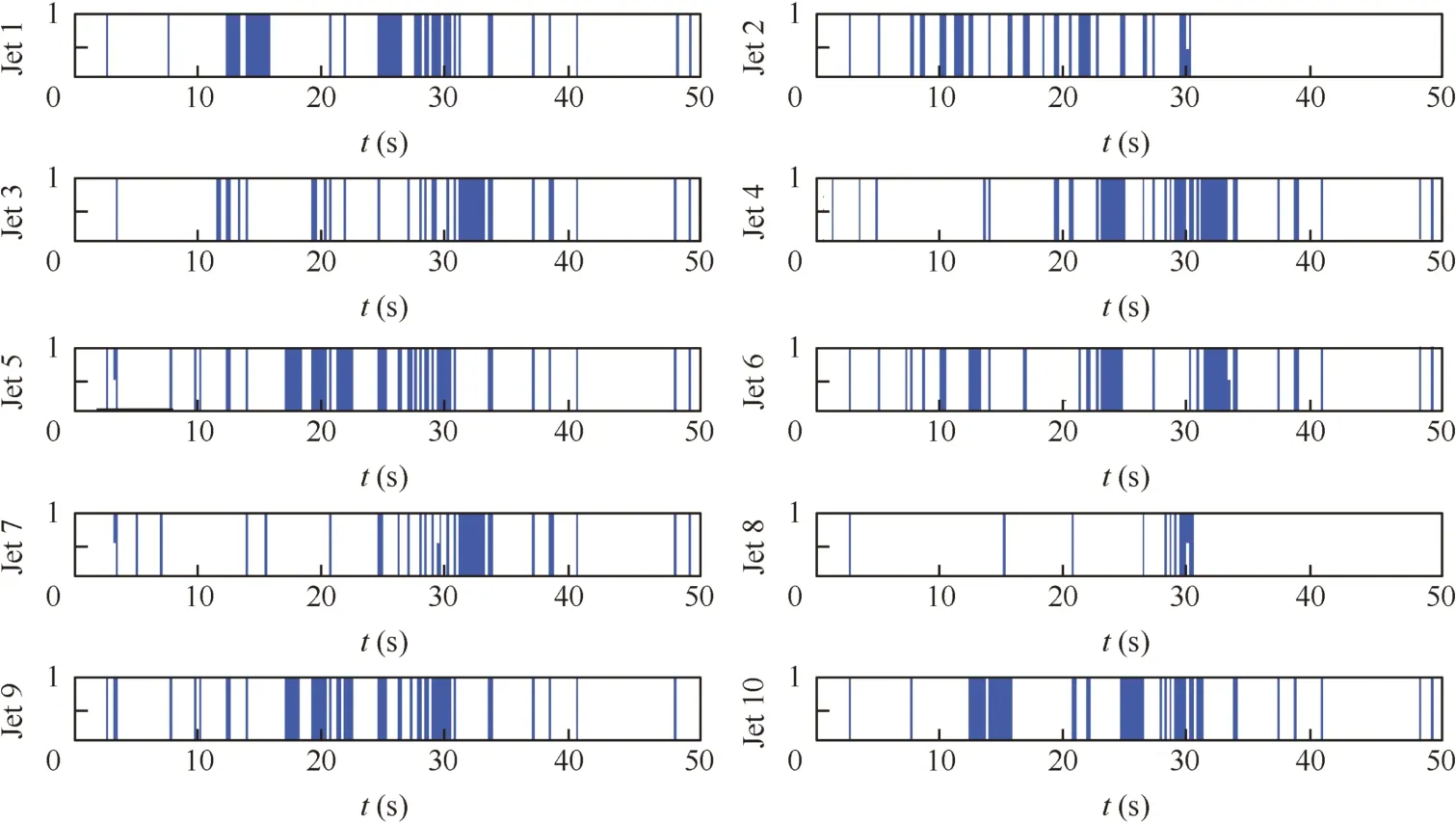
Fig.21 RCS on/off states in Case 4.
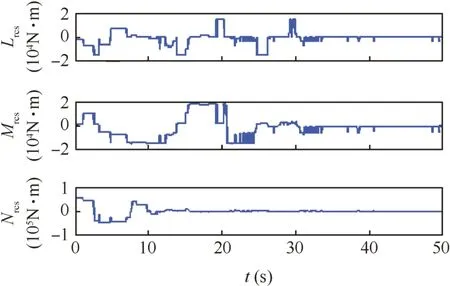
Fig.22 Torques provided by RCS in Case 4.
Acknowledgments
This work was supported by the National Natural Science Foundation of China(Nos.61374116 and 61533009)and the Six Talent Peaks Project in Jiangsu Province(No.HKHT-010).
Appendix A.Supplementary material
Supplementary data associated with this article can be found,in the online version,at http://dx.doi.org/10.1016/j.cja.2017.01.003.
1.Shaughnessy JD,Pinckney SZ,McMinn JD,Cruz CI,Kelley ML.Hypersonic vehicle simulation model:winged-cone configuration.Washington,D.C.:NASA;1990.Report No.:NASA-TM-102610.lf ight vehicles with prediction model in discrete time.Neurocomputing2013;115(4):39–48.
2.Parker JT,Serrani A,Yurkovich S,Bolender MA,Doman DB.Control-oriented modeling of an air-breathing hypersonic vehicle.J Guid Control Dyn2007;30(3):856–69.
3.Bolender MA,Doman DB.A nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle.J Spacecraft Rockets2007;44(2):374–87.
4.Xu H,Mirmirani M,Ioannou P.Adaptive sliding mode control design for a hypersonic flight vehicle.J Guid Control Dyn2004;27(5):829–38.
5.Hu X,Wu L,Hu C,Gao H.Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle.J Franklin Inst2012;349:559–77.
6.Xu B,Wang D,Sun F,Shi Z.Direct neural control of hypersonic
7.Fiorentini L,Serrani A.Adaptive restricted trajectory tracking for a non-minimum phase hypersonic vehicle model.Automatica2012;48:1248–61.
8.Gao D,Sun Z,Luo X.Fuzzy adaptive control for hypersonic vehicle via backstepping method.Control Theor Appl2008;25(5):805–10.
9.Zong Q,Wang J,Tian B.Quasi-continuous high-order sliding mode controller and observer design for flexible hypersonic vehicle.Aerosp Sci Technol2013;27(1):127–37.
10.Bu X,Wu X,Ma Z,Zhang R.Novel adaptive neural control of flexible air-breathing hypersonic vehicles based on sliding mode differentiator.Chin J Aeronaut2015;28(4):1209–16.
11.Hu X,Wu L,Hu C,Gao H.Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle.J Franklin Inst2012;349(2):559–77.
12.Shtessel Y,McDuf fie J,Jackson M,Hall C,Gallaher M,Krupp D,et al.Sliding mode control of the X-33 vehicle in launch and reentry modes.Reston:AIAA;1998.Report No.:AIAA-1998-4414.
13.Doman DB,Ngo AD.Dynamic inversion based adaptive/reconfigurable control of the X-33 on ascent.J Guid Control Dyn2002;25(2):275–84.
14.Wang Y,Jiang C,Wu Q.Attitude tracking control for variable structure near space vehicles based on switched nonlinear systems.Chin J Aeronaut2013;26(1):186–93.
15.Charles EH,Shtessel YB.Sliding mode disturbance observer based control for a reusable launch vehicle.J Guid Control Dyn2006;29(6):1315–28.
16.Gayaka S,Yao B.Accommodation of unknown actuator faults using output feedback-based adaptive robust control.Int J Adapt Control Signal Process2011;25(1):965–82.
17.Gayaka S,Yao B.Output feedback based adaptive robust faulttolerant control for a class of uncertain nonlinear systems.J Syst Eng Electr2011;22(1):38–51.
18.Gayaka S,Lu L,Yao B.Global stabilization of a chain of integratorswith inputsaturation and disturbances:anew approach.Automatica2012;48(7):1389–96.
19.Qi R,Huang Y,Jiang B,Tao G.Adaptive backstepping control for hypersonic vehicle with uncertain parameters and actuator failures.Proc IMechE:Part I–J Syst Control Eng2013;227(1):51–61.
20.He J,Qi R,Jiang B,Qian J.Adaptive output feedback fault tolerant control design for hypersonic flight vehicles.J Franklin Inst2015;352(5):1811–35.
21.Xu B,Yang C,Pan Y.Global neural dynamic surface tracking control of strict-feedback systems with application to hypersonic flight vehicle.IEEE Trans Neural Netw Learn Syst2015;26(10):2563–75.
22.Xu B,Zhang Y.Neural discrete back-stepping control of hypersonic flight vehicle with equivalent prediction model.Neurocomputing2015;154:337–46.
23.Xu B,Guo Y,Yuan Y.Fault tolerant control using command filtered adaptive back-stepping technique:application to hypersonic longitudinal flight dynamics.Int J Adapt Control Signal Process2016;30(4):553–77.
24.Xu B.Robust adaptive neural control of flexible hypersonic flight vehicle with dead-zone input nonlinearity.Nonlinear Dyn2015;80(3):1509–20.
25.Xu B,Huang X,Wang D.Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation.Asian J Control2014;16(1):162–74.
26.Xu B,Shi Z.An overview on flight dynamics and control approaches for hypersonic vehicles.Sci China Inform Sci2015;58(7):1–19.
27.Burken JJ,Lu P,Wu ZL,Bahm C.Two reconfigurable flight control design methods:robust servomechanism and control allocation.J Guid Control Dyn2001;24(3):482–93.
28.Shtessel Y,Hall C.Sliding model control of the X33 with an engine failure.Reston:AIAA;2000.Report No.:AIAA-2000-3883.
29.Zhu JJ,Lawrence DA,Fisher J,Shtessel YB et al.Direct fault tolerant RLV attitude control a singular perturbation approach.Reston:AIAA;2002.Report No.:AIAA-2002-4778.
30.Hu Q,Xiao B,Zhang Y.Fault-tolerant attitude control for spacecraft under loss of actuator effectiveness.J Guid Control Dyn2011;34(3):927–32.
31.Yao X,Tao G,Qi R,Jiang B.An adaptive actuator failure compensation scheme for an attitude dynamic model of near space vehicles.Proceedings of American control conference;2012 Jun 27–29;Montreal,Canada.Piscataway(NJ):IEEE Press;2012.p.368–73.
32.Xu D,Jiang B,Liu H.Fast robust asymptotic fault accommodation for reentry near space vehicles.Reston:AIAA;2012.Report No.:AIAA-2012-4451.
33.Xu D,Jiang B,Liu H,Shi P.Decentralized asymptotic fault tolerant control of near space vehicle with high order actuator dynamics.J Franklin Inst2012;350(9):2519–34.
34.Shen Q,Jiang B,Cocquempot V.Fuzzy logic system-based adaptive fault tolerant control for near space vehicle attitude dynamics with actuator faults.IEEE Tran Fuzzy Syst2012;20(6):289–300.
35.Zhao J,Jiang B,Shi P.Fault tolerant control design for near space vehicles based on dynamic terminal sliding mode technique.Proc IME,Part I:J Syst Control Eng2012;226(6):787–94.
36.Tan C,Yao X,Tao G,Qi R.Multiple-model based adaptive actuator failure compensation scheme for control of near-space vehicles.Proceedings of the 8th IFAC symposium on fault detection,supervision and safety of technical processes(SAFEPROCESS);2012 August 29–31;Mexico City,Mexico.Toulouse:IFAC;2012.p.594–9.
37.Zhang Y,Li K,Zhang Q,Ren Z.Reaction control system of RLV blended control in reentry mode.Aerospace Control2008;26(3):19–24.
38.Qian C,Wu Q,Jiang C,Zhou L.Flight control for an aerospace vehicle’s reentry attitude based on thrust of reaction jets.J Aerospace Power2008;23(8):1546–52.
39.Liang D,Song J,Cai G.Control system design for hypersonic reentry vehicle driven by RCS based on modified phase plane method.Proceedings of the 32nd Chinese control conference;2013 July 26–28,Xi’an,China.Piscataway(NJ):IEEE Press;2013.p.2372–6.
40.Paradiso JA.Adaptable method of managing jets and aerosurfaces for aerospace vehicle control.J Guid Control Dyn1991;14(1):44–50.
41.Zhou Y,Huang Y,Sun C.Control technology based on pulse width modulation ofRCS.Inform ElectronicEng2012;10(4):446–50.
42.Doman DB,Gamble BJ,Ngo AD.Control allocation of reaction control jets and aerodynamic surfaces for entry vehicles.Reston:AIAA;2007.Report No.:AIAA-2007-6778.
43.Doman DB,Gamble BJ,Ngo AD.Quantized control allocation of reaction control jets and aerodynamic control surfaces.J Guid Control Dyn2009;32(1):13–24.
44.He C,Chen X,Yang Y.Mixed programming control allocation for reusable launch vehicles using dynamic inverse calculating.Syst Eng Electr2010;32(9):1973–6.
45.Geng J,Sheng Y,Liu X.Finite-time sliding mode attitude control for a reentry vehicle with blended aerodynamic surfaces and a reaction control system.Chin J Aeronaut2014;27(4):964–76.
46.Liberzon D.Hybrid feedback stabilization of systems with quantized signals.Automatica2003;39:1543–54.
47.Khalil HK.Nonlinear systems.New York:Macmillan;1992.
48.Burken JJ,Lu P,Wu Z.Reconfigurable flight control designs with application to the X-33 vehicle.Reston:AIAA;1999.Report No.:AIAA-1999-4134.
49.Lo¨fberg J.YALMIP:A toolbox for modeling and optimization in MATLAB [Internet][cited 2016 February]Availablefrom:
4 March 2016;revised 13 July 2016;accepted 7 December 2016
Available online 14 February 2017
*Corresponding author.
E-mail address:ruiyun.qi@nuaa.edu.cn(R.Qi).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2017年2期
CHINESE JOURNAL OF AERONAUTICS2017年2期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- High-temperature tribological behaviors of a Cr-Si co-alloyed layer on TA15 alloy
- Analysis and control of the compaction force in the composite prepreg tape winding process for rocket motor nozzles
- Impact of lubricant traction coefficient on cage’s dynamic characteristics in high-speed angular contact ball bearing
- Variable stiffness design of redundantly actuated planar rotational parallel mechanisms
- Adaptive formation control of quadrotor unmanned aerial vehicles with bounded control thrust
- Constrained adaptive neural network control of an MIMO aeroelastic system with input nonlinearities