
Outdoor position estimation based on a combination system of GPS-INS by using UPF
2013-11-01 01:26:22YunkiKimJaehyunParkJangmyungLee
Yunki Kim, Jaehyun Park, Jangmyung Lee
(Dept. of Electrical Engineering, Pusan National University, Pusan 609-735, Korea)
Outdoor position estimation based on a combination system of GPS-INS by using UPF
Yunki Kim, Jaehyun Park, Jangmyung Lee
(Dept. of Electrical Engineering, Pusan National University, Pusan 609-735, Korea)
This paper proposes a technique that global positioning system (GPS) combines inertial navigation system (INS) by using unscented particle filter (UPF) to estimate the exact outdoor position. This system can make up for the weak point on position estimation by the merits of GPS and INS. In general, extended Kalman filter (EKF) has been widely used in order to combine GPS with INS. However, UPF can get the position more accurately and correctly than EKF when it is applied to real-system included non-linear, irregular distribution errors. In this paper, the accuracy of UPF is proved through the simulation experiment, using the virtual-data needed for the test.
global positioning system (GPS); unscented particle filter (UPF); navigation; inertial navigation system (INS); strapdown inertial navigation system (SDINS)
The position estimation of the moving objects is of great interest to be studied, especially for global positioning system(GPS) and inertial navigation system (INS), a lot of researches are in progress[1].
INS is navigation system that assumes position, posture and the direction by calculating according to the initial location and direction of the acceleration of the fuselage with inertial measurement unit(IMU)[2]. IMU consists of inertial sensors gyroscope, accelerometer, etc, and it can provide small and accurate information with the development of micro electro mechanical systems (MEMS). Especially, it has been used in aviation and marine fields. IMU can provide precise location information during short time. However, if it is used for a long time, due to errors and disturbances, the final estimated value is very different from the original value. To compensate for this kind of absolute value, the sensor fusion is used[3,4]. GPS is used mainly outdoors. which can provide accurate and absolute position based on satellite radio navigation system.
Extended Kalman filter (EKF) is mainly used to amalgamate both INS and GPS data. EKF transfers nonlinear system to linear system by using Taylor series expansion. Therefore, there is disadvantage that according to change of time, tolerance can be greater. To solve these limitations, unscented Kalman filter (UKF) or Hybrid type filter, toting both particle filter (PF) and other filters[5], are used.
This paper introduces unscented particle filter (UPF), which consists of particle filter and UKF for combination of INS and GPS, into outdoor location estimation system.
The paper is organized as follows: Section 1 introduces INS; Section 2 describes the characteristics of various probability-based filters; Section 3 gives the simulation experiments to verify the validity of UPF; and finally, a conclusion is drawn.
1 INS
1.1 Strapdown INS (SDINS)
SDINS is the system in which inertial sensors are directly attached to an antibody. Here, sensor’s output angular velocity and acceleration value are expressed as variations on body frame.
So, the process changing measurement value to navigation frame is needed[6]. First, measured angular velocity is cumulative to estimate position. transformation matrix is calculated to change from body frame to navigation frame, which transfers the measured value from body frame’s acceleration to navigation frame. Then, gravity included in acceleration is removed and a value is got. By accumulating acceleration to the initial values of velocity, current speed and position can be obtained.
Fig.1 shows strapdown inertial navigation algorithm. What primarily used in strapdown system for coordinate transformation are direction cosine, Euler angle and a way of quaternions. Comparison of features, advantages and disadvantages of each method is shown in Table 1[7].

Fig.1 Strapdown inertial navigation algorithm
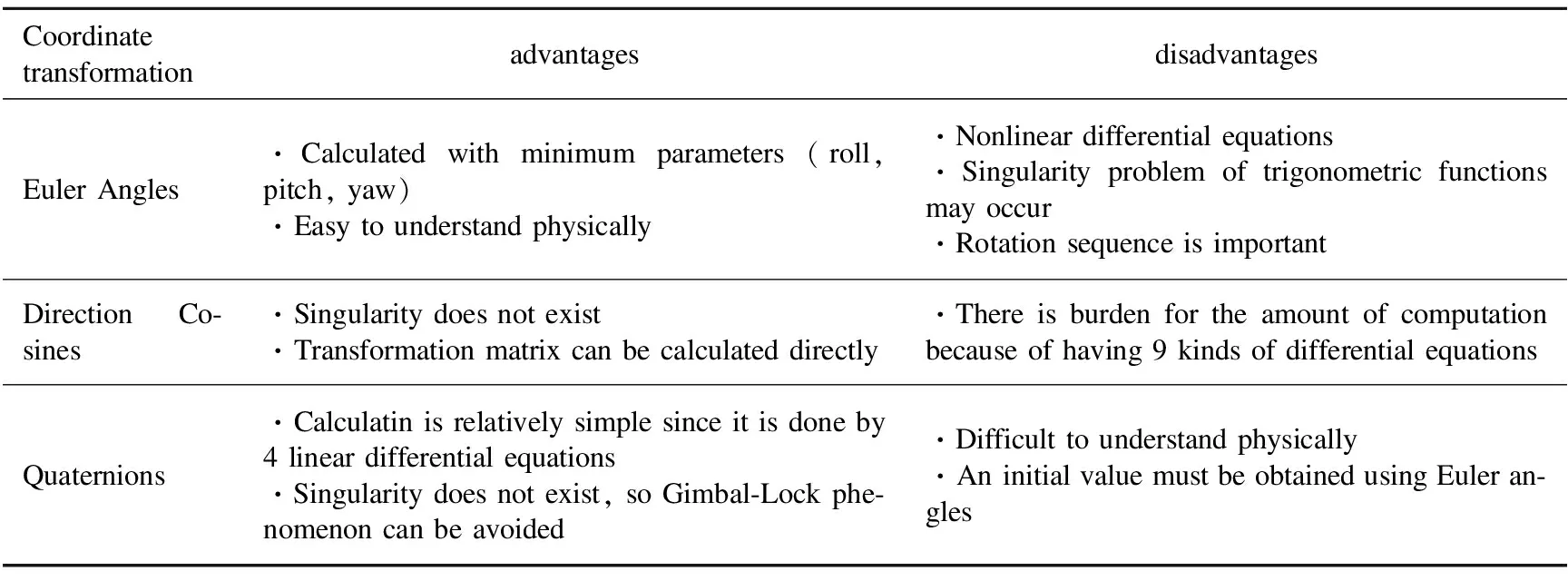
Table 1 Pros and cons of the various coordinate transformation method
This paper is oriented for fast and accurate system. Thus, 3-D position of the antibody is determined using the quaternion method.
1.2 Aided inertial navigation
Aided INS amalgamated sensor with the absolute value in order to overcome the shortcomings that cumulate errors of the inertial sensor to get the value of the position by INS[8]. Fig.2 shows a block diagram of aided SDINS which corrects position and location using information obtained from the inertial sensors and GPS[2,9].

Fig.2 Block diagram of aided inertial navigation

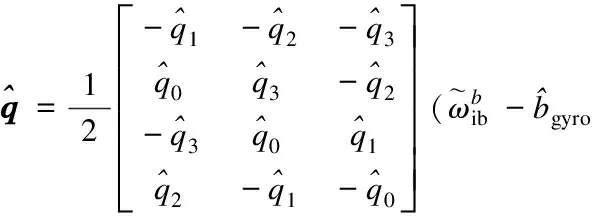
The attitude expressed with quaternion can obtain transformation matrix by converting antibodies in the coordinate system to coordinate navigation

δxk=fk(δxk-1)+ωk,
where fkis state wave function (system equation), hkis measurement equation (measurement Eq.), ωkis the system error, vkis the measurement error and δykis the measured value.

-p≡[x y z]T,
-v≡[vxvyvz]T,
where -εNand εEare tilt errors; -εDis heading error.
2 Probability based filters
Various fields have tried actively to solve the problem about the estimation of the state variables for dynamic systems. Of them, methods based on stochastic constitute probability space consisting of state variables. Using system’s dynamic characteristics and measurement, when the initial probability density (p(x0)), the state transition density (p(xk|xk-1)), and likelihood in the measurement model (p(yk|xk)) are given, the optimal current state value which is based on input and measures, and essentially posterior probabilities (p(xk|y0∶k) or p(x0∶k|y0∶k)) are estimated. This method is generally based on Bayesian estimation. In the field of localization, EKF, which is the extended one of Kalman filter, UKF and the particle filter are notably being studied[3]. Filters are applied differently depending on how to define the system model and the characteristics of the noise distribution. Table 2 summarizes the characteristics of typical filters.
In the case of KF, it can be only used for linear systems, and it leads the result that many fields can not apply to using it. For this reason, EKF was developed right after KF had been developed. EKF is the probability-based filter which is largely used in various fields. For every estimation, the nonlinear system is estimated as the value of the state, and develops Taylor series for linearization[11]. This method has an advantage that it is fast and simply. On the other hand, it is a disadvantage that the error may become bigger when nonlinear is severe or the noise strays from the normal distribution a lot. Thus, the proposed method is UKF. The filter, like EKF, can be used in nonlinear and models having normal distribution noise. However, unlike EKF which linearizes, UKF generates expected value of sample points (sigma points) by calculating dispersion. It is the method that obtains more correct state of the expected value and dispersion[12,13].
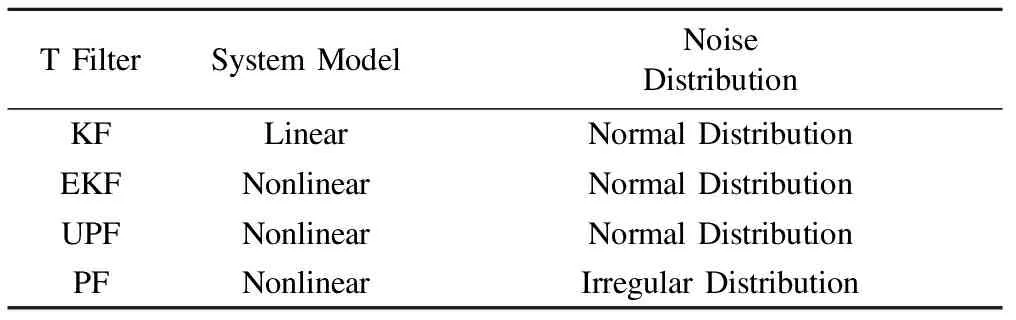
Table 2 Mean of the error of attitude and position
Fig.3(a) is got by actual mean and variance through passing all sampling points to f, nonlinear system. Fig.3(b) is got by unscented transform (UT) of UKF, and Fig.3(c) predicts the following conditions and variance through EKF’s linearization method.
As you can see in Fig.3, UPF than EKF in nonlinear systems can predict the next state more accurately.
Therefore, UKF is more suitable than EKF in nonlinear systems[14]. However, the UKF also assumes that the errors follow a normal distribution, and thus there are some differences from the actual system model. PF repeatedly performs the Monte Carlo integration, unlike the other filters to minimize non-linear system assumption, irregular distribution of the error model takes advantage of high accuracy can be estimation. For outdoor mobile robot, because of environmental factors, disturbance and tolerance, using PF increases the accuracy. PF algorithm, as shown in Fig.3, using the state transition function, can predict the following state and the weight, and using measurement value, particle weight update and normalize is the weighted effective bias reduction in the number of particles to prevent the re-sampling of particles will be sequenced[15,16].

Fig.3 Estimation comparison of UKF and EKF
At this point in the EKF or UKF prediction step of the way, the more accurate the next state and the weight of the particle can be predicted[5,17]. In this paper, using UPF, combining PF and UKF, more precise positioning estimation can be got.
3 Experiment
This paper compares performance according to the kind of filter for system estimating outdoor location using UPF. To compare performance of filter, driving information of arbitrary circle path is generated. The generated driving information (posture, position) are compared. To prove excellence of UPF, comparison is made in case applying no filter, applying EKF and UPK, respectirely. Particle number of UPF is experimented by setting 250.

Fig.4 Estimated position (particle number=250)
Fig.4 is the estimated position of antibodies. The actual path starts at (0,0) →3 m straight to the right →2 m radius semicircle path rotation →6 m straight →→2 m radius semicircle path rotation →3 m straight(Initial position). Non filtering is in case if do not apply, and GPS is local information got from GPS.
To quantitatively compare performance of each filter, appear average value of posture error and local error are got through 10 times experiment. Table 3 shows posture error and local error.

Table 3 Mean of the error of attitude and position
4 Conclusion
EKF is the quick and simple method to estimate indoor local error by combining GPS and INS, which has been used recently and will be used for a long time and be verified. But it is difficulty to use in non-linear system. To apply model in close actual system, another method is needed. The UPF is kind of PF, being non-linear and using the model similar to the actual system. And it is the filters that has more enhanced estimation accuracy by using method of UPF. The usefulness of UPF is proved through experiments. From now, leave fusion methods that be used in real time position estimation through combining various filters more quickly estimated as a next project.

[2] Park J Y, Lee J H, Nam D K, et al. Investigations on GPS/INS integration for land vehicle navigation. In: Proceedings of KIIS fall conference, 2009, 19(2): 3-360.
[3] Lee J K. The estimation methods for an integrated INS/GPS UXO geolocation system. The Ohio State University Report, No. 493, 2009.
[4] Aggarwal P, Syed Z, Noureldin A, et al. MEMS-based integrated navigation. Artech House, 2010.
[5] Aggarwal P, Syed Z, El-sheimy N. Hybrid extended particle filter(HEPF) for integrated inertial navigation and global positioning system. Measurement Science and Technology, 2009, 20(5): 1-9.
[6] Woodman O J. An introduction to inertial navigation. University of Cambridge Technical Report, No.696, 2007.
[7] Siouris G M. Aerospace avionics systems a modern synthesis. Academic Press Inc., 1993: 67.
[8] Skog I, Handel P. Time synchronization errors in GPS-aided inertial navigation system. IEEE Transactions on Intelligent Transportation Systems, 2011.
[9] Hwang S Y, Lee and J M. Estimation of attitude and position of moving objects using multi-filtered inertial navigation system. The Transactions of KIEE, 2011, 60(12): 2183-2396.
[10] Farrell J A. Aided navigation. McGrawHill, 2008.
[11] de Melo L F, Mangili J F Jr. Trajectory planning for nonholonomic mobile robot using extended Kalman filter. Mathematical Problems in Engineering, 2010: 1-22.
[12] Wan E A, van der Merwe R. The unscented Kalman filter for nonlinear estimation. In: Proceedings of IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium. IEEE, 2000: 153-158.
[13] Hartikainen J, Sarkka S. Optimal filtering with Kalman filters and smoothers-a manual for matlab toolbox EKF / UKF. Biomedical Engineering, 2008: 1-57.
[14] Haykin S, Kalman filtering and neural networks, John Wiley & Sons, New York, 2001.
[15] Gustafsson F, Gunnarsson F, Bergman N, et al. Particle filters for positioning, navigation, and tracking. IEEE Transactions on Signal Processing, 2002, 50(2): 425-437.
[16] YANG Ning, TIAN Wei-Feng, JIN Zhi-hua, et al. Particle filter for sensor fusion in a land vehicle navigation system. Measurement Science and Technology, 2005, 16: 677-681.
[17] CHEN Zhe. Bayesian filtering: from Kalman filters to particld filters, and beyound. Citeseer, 2003: 1-69.
date: 2012-09-26
The MKE(the Ministry of Knowledge Economy), Korea, under the ITRC(Information Technology Research Center) support program supervised by the NIPA(National IT Industry Promotion Agency) (NIPA-2012-H0301-12-2006)
Jangmyung Lee (jmlee@pusan.ac.kr)
CLD number: TN967 Document code: A
1674-8042(2013)01-0047-05
10.3969/j.issn.1674-8042.2013.01.011
 Journal of Measurement Science and Instrumentation2013年1期
Journal of Measurement Science and Instrumentation2013年1期
- Journal of Measurement Science and Instrumentation的其它文章
- Acetonitrile (CH3CN) and methyl isocyanide(CH3NC) adsorption on Pt(111) surface: a DFT study
- Randomized Kaczmarz algorithm for CT reconstruction
- An improved ant colony algorithm and its application in optimal routing problem
- Digital FIR filter design for bio-signal processing system
- Odorant discrimination using functional near-infrared spectroscopy of the main olfactory bulb in rats
- Techniques trend analysis of propagating laser beam quality measurement