
Trajectory tracking control of the bionic joint of the musculoskeletal leg mechanism①
2017-06-27 08:09:22LeiJingtao雷靜桃ZhuJianminWuJiandong
High Technology Letters 2017年2期
Lei Jingtao (雷靜桃), Zhu Jianmin, Wu Jiandong
(*School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200072, P.R.China) (**College of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, P.R.China)
Trajectory tracking control of the bionic joint of the musculoskeletal leg mechanism①
Lei Jingtao (雷靜桃)②*, Zhu Jianmin**, Wu Jiandong*
(*School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200072, P.R.China) (**College of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, P.R.China)
Pneumatic artificial muscles (PAMs) have properties similar to biological muscles, which are widely used in robotics as actuators. It is difficult to achieve high-precision position control for robotics system driven by PAMs. A 3-DOF musculoskeletal bionic leg mechanism is presented, which is driven by PAMs for quadruped robots. PAM is used to simulate the compliance of biological muscle. The kinematics of the leg swing is derived, and the foot desired trajectory is planned as the sinusoidal functions. The swing experiments of the musculoskeletal leg mechanism are conducted to analyse the extension and flexion of joints. A proportional integral derivative (PID) algorithm is presented for controlling the flexion/extension of the joint. The trajectory tracking results of joints and the PAM gas pressure are obtained. Experimental results show that the developed leg mechanism exhibits good biological properties.
musculoskeletal leg mechanism, swing, bionic joint, trajectory tracking, proportional integral derivative (PID) control
0 Introduction
Four-legged creatures have advanced mobility in natural environment, which is the long-term evolution result of the biological adapting to the natural environment. Better mobility mainly depends on the structure of flexible body and legs, which is a musculoskeletal system, and the muscles and skeletal could move coordinatedly to adapt to different locomotion velocity and terrains[1,2].
Various bionic leg mechanisms have been developed for quadruped robots worldwide. The biological structure consists of many bones connected with muscles and ligaments that work antagonistically and synergistically. A musculoskeletal system is required to produce animal-like motions, and researchers have carried out investigations[3]. PAM has been widely adopted as an actuator in musculoskeletal system, and similar to a biological muscle in shape and working principles, thus can meet the relevant flexibility requirements.
PAMs have many desirable characteristics, such as flexibility similar to biological muscles, high power to weight ratio, high power to volume ratio, and inherent compliance therefore have been widely used in various robotic systems[4]. Hosoda[5]developed a biped robot with a bio-mimetic muscular-skeleton system driven by McKibben PAM which realises stable bouncing. Takuma[6]presented a bipedal robot and a feedforward controller to achieve multi-modal locomotion by tuning appropriate leg compliance on individual locomotion. The rotational joints were driven by McKibben pneumatic muscles. Niiyama[7]presented a pneumatically actuated bipedal robot called “Mowgli”, with an artificial musculoskeletal system consisting of six McKibben pneumatic muscle actuators. The robot could achieve vertical jumping with disturbance. Aschenbeck[8]developed a canine-inspired quadruped robot in which PAMs were used to actuate the robot. Kenichi[9]developed a quadruped robot with the minimalistic and light-weight body for achieving fast locomotion and McKibben PAMs were used as actuators to provide high frequency and wide stride motion, and also to avoid problems of overheating. A central pattern generator-based open loop controller was adopted to realise the bouncing gait of the robot. Andre[10]presented a hopping mechanism driven by seven PAMs. The hopping direction of the robotic hind-limb could be controlled by using a non-linear curve fitting from experimental results. Keisuke[11]developed a one-leg jumping robot driven by 9 PAMs that could mimic the muscular and skeletal system of a human leg. Two kinds of muscles: mono-articular type and bi-articular type were adopted. Motion experiments were conducted to verify the effectiveness of the mechanism and the control system. Niiyama[12]presented a robot with an artificial musculoskeletal system driven by PAMs. The structure of the robot was similar to an animal for biomechanics study. The robot could achieve vertical jumping, soft landing and postural control during standing. Wang, et al.[13,14]developed a quadruped robot driven by PAMs who adopted a basic position control method and model-based position control method to control the joint positon. Their experimental investigations showed the variation of joint stiffness with time. Xie, et al.[15]presented a lower limb mechanism driven by PAMs. Based on analyzing the output force model of PAM, a proportional integral derivative (PID) control algorithm was adopted.
A kind of antagonistic joint driven by two PAMs is presented, and an adaptive recurrent neural networks (ARNN) controller is designed. The joint position control is studied by the experiment and simulation with three different load cases of 0.5kg, 2kg and 10kg, which tracking error is very small less than ±0.5° for a load of 0.5kg and less than ±2° for a load of 10kg[16]. A bionic joint driven by PAMs is presented, where a classic PI controller, an enhanced PID controller, a robust controller and sliding-mode controller are designed. The position control experiments of the bionic joint are performed. Experimental results show that the average trajectory tracking error is less than ±1°[17]. One-dimensional manipulator actuated by two PAMs is presented. A Takagi-Sugeno fuzzy model-based controller is designed. Experimental results show that the proposed controller can achieve excellent tracking performance under different disturbance. The tracking error of the T-S fuzzy model-based control is maintained within 2°[18].
Based on the biological principles of the skeletal and muscle coordinated movement, a musculoskeletal three degrees of freedom (DOF) leg mechanism driven by PAMs for a quadruped robot is proposed in this paper. The configuration of three rotating joints of the leg mechanism is different from other leg mechanisms, which can achieve side swing, forward and backward swing. The kinematics of the leg mechanism is derived to determine the relationship between the joint angular displacement and the foot positon. The foot trajectory is planned as the sinusoidal function. A PID control algorithm is adopted to control the swing of the leg. The experiment on the musculoskeletal leg mechanism is performed to evaluate and assess the performance of joint movement and the control algorithm.
1 Musculoskeletal leg mechanism
Based on the design principles of the light weight and bionic, from the point of the mechanism, drive and motion bionic, with reference to biological leg muscle arrangement, elastic tendons, antagonistic drive bionic design concept, using the PAMs similar to biological characteristics of muscle, the musculoskeletal leg mechanism is innovatively designed, which reflects the biological flexible, multi-muscle coordinated movement, and the PAMs are reasonably arranged to achieve large enough rotating range of the bionic leg joints.
The configuration of the muscles is compatible with four-legged animals. The musculoskeletal bionic leg is based on quadruped animals, such as, dog or cheetah. For the joint rotating range of the hind limb of the cheetah, spine-hip joint has a range of 145 degrees, and the knee joint has a range of 104 degrees, the ankle joint is 95 degrees[19].
The leg has three DOFs. FESTO-type PAMs are used to provide the non-linear properties of biological muscles. The 3-DOF musculoskeletal leg mechanism is presented in Fig.1, where PAMs play an important role in realising coordinated movements of joints. The leg mechanism has three rotational joints driven by PAMs, and these are side-swing hip joint, forward-swing hip joint and knee joint. The axis of the first joint is perpendicular to the axis of the second joint. The axes of the second and the third joints are parallel, which can increase the motion range of the foot. The 2-DOF hip joint can achieve side-swing and forward/backward swing. The ranges of motion of the joints are designed similar to those of quadruped animals.
Four muscles are arranged for the leg mechanism. The flexion/extension of the side-swing hip joint or the forward-swing joint are driven by one PAM. The flexion/extension of the knee joint is driven by two PAMs in order to increase its range of rotation. PAM has the tendency of contracting and is hard to elongate. These characteristics are considered in the design of the musculoskeletal leg mechanism to avoid interference of PAMs during rotation of the joints. For the PAMs used in the knee joint, when one is charged with gas, the other end can be moved by the mechanical stretch structure.

(a) Mechanism structure

(b) PAMs arrangement
2 Kinematics
2.1 Forward kinematics
Kinematics is not concerned with forces, either internal or external. Swing is the event when the foot is in the air. The kinematics of leg mechanism in the swing phase is analysed here, using the Denavit-Hartenberg (D-H) convention, as shown in Fig.2. The link parameters are shown in Table 1.

Fig.2 D-Hcoordinate system

LinkNo.iLinklengthai(mm)Linkangleαi(°)Offsetdi(mm)Jointvariableθi(°)1l1/200-902l200θ23l300θ3
The position and orientation of the foot with respect to frame {0} can be described by a 4×4 homogeneous transformation matrix:
(1)
wheres2=sinθ2,c2=cosθ2,s23=sin(θ2+θ3),c23=cos(θ2+θ3).
2.2 Inverse kinematics
According to the planned foot trajectory, angular displacement of each joint can be determined through inverse kinematics of the leg mechanism.
The joint anglesθ1,θ2,θ3canbedeterminedasbelowusingtheinversetransformationmethod.
(2)
2.3Footdesiredtrajectory
Forthemusculoskeletallegmechanismpresentedabove,therotatingrangeofeachjointhasbeendeterminedbythePAMlength.Theside-swinghipjointcanreach23°,whiletheforward-swinghipjointreaches10°andthekneejointreaches55°.Accordingtotherotatingrangeoftheforward-swingjointandthekneejoint,thefoottrajectoryisplannedwiththesinusoidalfunction.
Thefoottrajectoriesalongthex-axis andz-axis are planned as sinusoidal functions. The side swing of the leg mechanism is not considered, hence the foot trajectory along they-axis is 0.The planned trajectory of the leg mechanism is as follows:
(3)
whereSisthestridelength,Histhestepheight,Tswistheswingcycle,andpx,py,pzaredisplacementsofthefootalongcoordinateaxesdirections.
3 Dynamics
Formusculoskeletallegmechanismswing,thecontactforcebetweenthefootandtheenvironmentdoesnotneedtobeconsidered.Sothelegcanbeconsideredasaseriesmanipulator.Lagrange’sformulationisusedheretoderivethedynamicsofthenonlinearsystem.Firstly,thePAMisn’tconsidered,thedynamicsofthelegswingcanbederivedinthejointspaceinthefollowingform:

(4)

Taking the knee joint as example, the relationship between the joint driving torque and the PAM output force can be derived. Meanwhile, the PAM output force is related to the inner gas pressure. The structure parameters and the force analysis of the antagonistic knee joint are shown in Fig.3.

Fig.3 Force analysis of antagonistic knee joint
The relationship between the joint driving torque and the PAM force can be expressed as
(5)
whereτ3isthekneejointdrivingtorque.meis the equivalent mass of the external load.megis the equivalent gravity of the external load. F3, F4are the PAM output forces.d3,d4aretheforcearmsofforceF3and F4, respectively.
The structural and gait parameters are shown in Table 2.

Table 2 Structural and gait parameters
4 Leg swing experiments
The swing experiments of the musculoskeletal leg mechanism are conducted to analyse the extension/flexion of joints and the leg performance. A PID algorithm is adopted to control the flexion/extension of the joint.
4.1 Experiment system
According to the planned foot trajectory of the leg swing, the trajectory tracking experiments of the forward-swing hip joint and the knee joint are performed. The experiment is conducted as shown in Fig.4.

Fig.4 Experimental platform of the leg swing
The trajectory tracking of the leg mechanism in swing is considered as the basis of performance criteria to demonstrate the accuracy and effectiveness of the proposed control algorithm. Experiments of the musculoskeletal leg mechanism are conducted to analyse the extension and flexion characteristics of the leg mechanism, and to assess the range of motion of each joint and the control algorithm.
The experimental system (see Fig.5) is composed of the leg mechanism, industrial PC, data acquisition card, pressure regulating valve, proportional pressure valves, pressure sensor and potentiometer. The hardware used in the experiment is shown in Table 3.
The NI PCI-6281 data acquisition card is used to obtain the joint position signal and the PAMs gas pressure by real-time collecting. These data are imported into computer. After the control program calculating, the control voltage signals are outputted and imported into the proportional pressure valve, and thus output gas pressure of the proportional valves are regulated and imported into the PAMs. The inner gas pressure of PAMs are controlled within 0.1Mpa and 0.6Mpa.
4.2 Experimental results
Precise position/angle control of PAM is not suitable. Instead the force/torque can be controlled relatively with ease by controlling the gas pressure which results in high-precision dynamic real-time compensation for the traditional PID controller.A proportional pressure valve is used to control the inner pressure of the muscles. The pressurized gas is exported by the air compressor and is supplied to the PAMs through the pressure regulating valve and proportional valve. The pressure regulating valve is used to change the system pressure, and the proportional valves are used to transform analogue input signal into a corresponding gas pressure. The proportional valve can be dynamically controlled by the controller, and the gas pressure is controlled at a certain value. A non-contact rotary position sensor is fixed on each joint, and a pressure sensor is used for measuring the gas pressure. Each PAM is supplied with one proportional valve. The maximum shrinkage of the PAMs is 20% of the initial length. The maximum pressure used was 0.6MPa, and the sampling frequency was 100Hz.

Table 3 Hardware used in the experiment
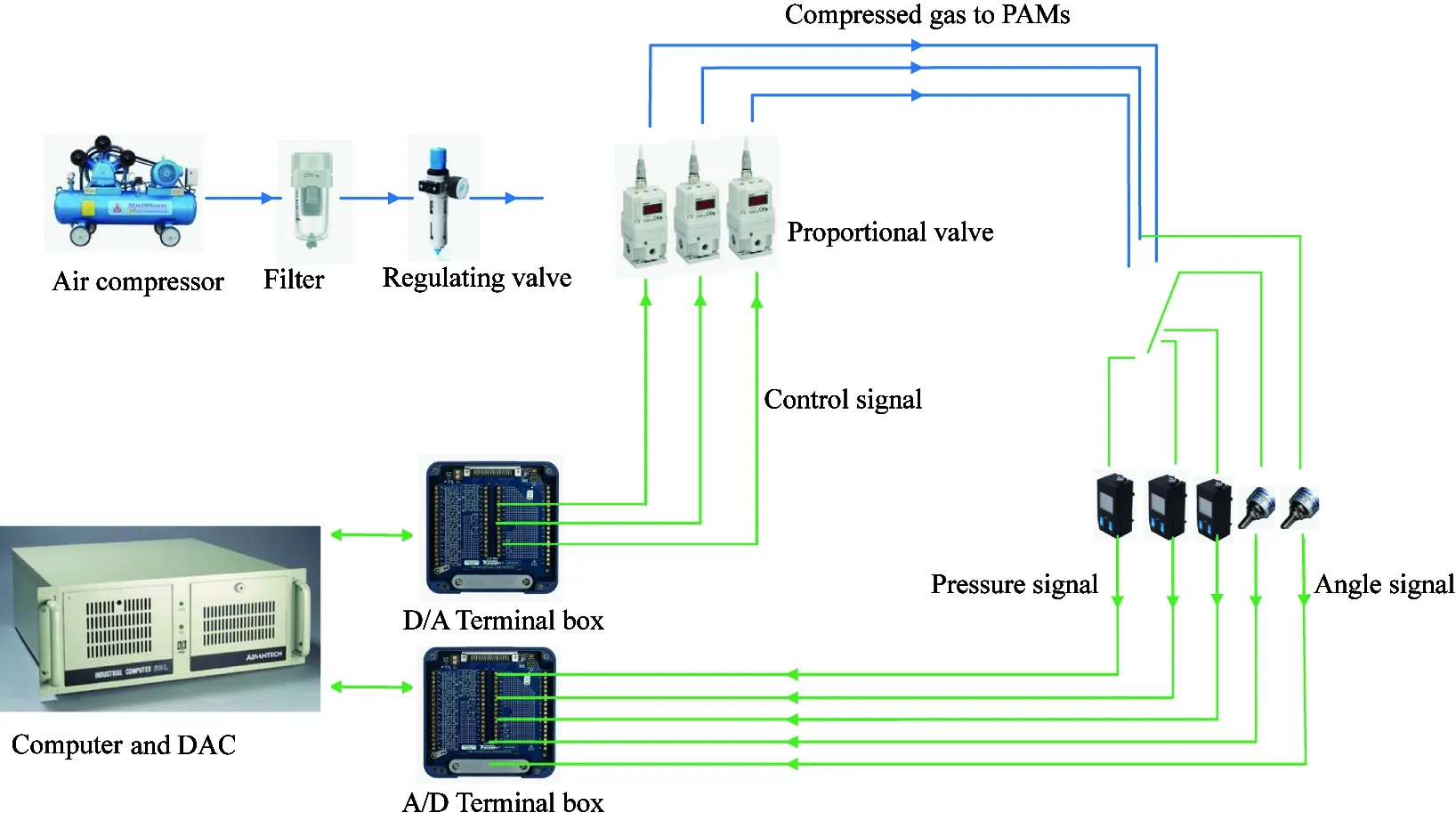
Fig.5 Experiment system of the leg swing
The proposed control method was experimentally tested on the musculoskeletal leg mechanism. The proportional gainkp,integralgainkianddifferentialgainkdareobtainedthroughatrialanderrorprocedure,andthesearegivenasfollows:
Forjoint2,kp=0.5,ki=8,kd=0.08,
Forjoint3,kp=3,ki=0.5,kd=0.15.
Thelegswingisrelatedwiththeforward-swinghipjointandthekneejoint.SothetrajectorytrackingresultsofthistwojointsandthePAMgaspressurecanbeobtained,asshowninFig.6.ThejointtrajectorytrackingresultsareshowninFig.6(a)~Fig.6(d).ThegaspressureofPAMsduringlegswingisshowninFig.6(e).

(a) Angle displacement of joint 2

(b) Tracking error of joint 2

(c) Angle displacement of joint 3

(d) Tracking error of joint 3

(e) PAM inner pressure
From Fig.7, the rotating range of the forward-swing joint is 10°, and the knee joint is 15°. As PAMs has highly nonlinear and time-varying behavior, it is difficult to achieve excellent tracking performance. For the musculoskeletal leg mechanism, the trajectory tracking error of joint should be controlled within 2°. It is noted that better effectiveness of the joint trajectory tracking is achieved. The tracking errors are within ±1°. At the beginning position of the leg swing, there is a relatively larger error. This is due to the instantaneous action of the proportional valve and thus leading to the pressure mutation of the PAMs. The experimental results show that the PID controller can be implemented in controlling the swing movement of the musculoskeletal leg mechanism, and the bionic leg could achieve stable swing according to the planned foot trajectory.

Fig.7 Swing of the musculoskeletal leg mechanism
5 Conclusions
A musculoskeletal leg mechanism driven by PAMs is presented, which can be applied to a quadruped robot to improve the flexibility and mobility of the robot. The kinematics of the leg mechanism are derived to determine the angular displacement of joints due to the planned trajectory of foot. The swing experiments of the musculoskeletal leg mechanism is conducted to evaluate its movement performance. A PID control algorithm is used for join trajectory tracking of the leg mechanism. The experimental results show that the required range of joint rotation and the planned movement of the leg mechanism can be achieved. Future work will focus on the jumping planning and control of the musculoskeletal leg mechanism.
[ 1] Penny E H, Sandra A C, Rachel C P,et al. Functional anatomy of the cheetah (Acinonyx jubatus) hindlimb.JournalofAnatomy, 2011,218(4): 363-373
[ 2] Ijspeert A J. Biorobotics: Using robots to emulate and investigate agile locomotion.Science, 2014,346(6206):196-203
[ 3] Nishikawa S, Yamada Y, Shida K, et al. Dynamic motions by a quadruped musculoskeletal robot with angle-dependent moment arms. In: Proceedings of the International Workshop on Bio-Inspired Robots, 2011. 1-3
[ 4] Andrikopoulos G, Nikolakopoulos G, Manesis S. A survey on applications of pneumatic artificial muscles. In: Proceedings of the 19th Mediterranean Conference on Control and Automation, Corfu, Greece, 2011. 1439-1446
[ 5] Hosoda K, Takayama H, Takuma T. Bouncing monopod with bio-mimetic muscular-skeleton system. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 2008. 3083-3088
[ 6] Takuma T, Hayashi S, Hosoda K. 3d bipedal robot with tunable leg compliance mechanism for multi-modal locomotion. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 2008.1097-1102
[ 7] Niiyama R, Nagakubo A, Kuniyoshi Y. Mowgli: a bipedal jumping and landing robot with an artificial musculoskeletal system. In: Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 2007. 2546-2551
[ 8] Aschenbeck K S, Kern N I, Bachmann R J, et al. Design of a quadruped robot driven by air muscles. In: Proceedings of the the 1st IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 2006. 875-880
[ 9] Narioka K, Rosendo A, Sproewitz A, et al. Development of a minimalistic pneumatic quadruped robot for fast locomotion. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, 2012. 307-311
[10] Rosendo A, Narioka K, Kohhosoda. Muscle roles on directional change during hopping of a biomimetic feline hindlimb. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, 2012. 1050-1055
[11] Sayama K, Masuta H, Lim Hum-ok. Development of one-legged jumping robot with artificial musculoskeletal system. In: Proceedings of the 9th International Conference on Ubiquitous Robots and Ambient Intelligence, Daejeon, Korea, 2012. 608-613
[12] Niiyama R, Kuniyoshi Y. Pneumatic biped with an artificial musculoskeletal system. In: Proceedings of the 4th International Symposium on Adaptive Motion of Animals and Machines, 2008. 80-81
[13] Wang X, Li M T, Guo W, et al. Development of an antagonistic bionic joint controller for a musculoskeletal quadruped. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013. 4466-4471
[14] Li M, Wang X, Guo W, et al. System design of a cheetah robot toward ultra-high speed.InternationalJournalofAdvancedRoboticSystems, 2014, 11(10):707-714
[15] Xie H, Chen K, Yang Y, et al. Artificial leg design and control research of a biped robot with heterogeneous legs based on PID control algorithm.InternationalJournalBioautomation, 2015, 19(1): 95-106
[16] Ahn K K, Anh H P H. Design and implementation of an adaptive recurrent neural networks (ARNN) controller of the pneumatic artificial muscle (PAM) manipulator.Mechatronics, 2009, 19(6): 816-828
[17] Pujana-arrese A, Mendizabal A, Arenas J, et al. Modelling in modelica and position control of a 1-DoF set-up powered by pneumatic muscles.Mechatronics, 2010, 20(5): 535-552
[18] Chang M K, Liou J J, Chen M L. T-S fuzzy model-based tracking control of a one-dimensional manipulator actuated by pneumatic artificial muscles.ControlEngineeringPractice, 2011, 19(12): 1442-1449
[19] Lewis M A, Bunting M R, Salemi B. Toward ultra high speed locomotors: design and test of a cheetah robot hind limb. In: Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 2011. 1990-1996
10.3772/j.issn.1006-6748.2017.02.001
①Supported by the National Natural Science Foundation of China (No. 51375289), Shanghai Municipal National Natural Science Foundation of China (No.13ZR1415500) and Innovation Fund of Shanghai Education Commission (No.13YZ020).
②To whom correspondence should be addressed. E-mail: jtlei2000@163.com
on Apr. 26, 2016
ao, born in 1970. She received her Ph.D degree from Beihang University in 2007. She also received her B.S. and M.S. degrees from Henan University of Science and Technology in 1991 and 1996 respectively. Her research interests include the bionic robot.
 High Technology Letters2017年2期
High Technology Letters2017年2期
- High Technology Letters的其它文章
- A real-time 5/3 lifting wavelet HD-video de-noising system based on FPGA①
- Mining potential social relationship with active learning in LBSN①
- Negation scope detection with a conditional random field model①
- A case study of 3D RTM-TTI algorithm on multicore and many-core platforms①
- Closed-form interference alignment with heterogeneous degrees of freedom①
- A transition method based on Bezier curve for trajectory planning in cartesian space①