
Robust Fault-Tolerant Control for Longitudinal Dynamics of Aircraft with Input Saturation
2016-09-06 01:02:05YangQingyunChenMou
Yang Qingyun, Chen Mou
College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, P.R. China
(Received 22 September 2015; revised 12 December 2015; accepted 19 December 2015)
Robust Fault-Tolerant Control for Longitudinal Dynamics of Aircraft with Input Saturation
Yang Qingyun, Chen Mou*
College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, P.R. China
(Received 22 September 2015; revised 12 December 2015; accepted 19 December 2015)
A robust fault-tolerant control scheme is proposed for the longitudinal dynamics of an aircraft with input saturation, using the anti-windup method and the fault detection observer technology. To estimate the system fault, a detection observer is designed for the longitudinal dynamics, and a fault-tolerant control law is developed to compensate for the fault effects of the longitudinal dynamics. Then, an anti-windup compensator is augmented into the fault-tolerant control law to eliminate the effect of input saturation. Using linear matrix inequality (LMI) technology, the detection observer based fault-tolerant controller is designed to ensure the stability of the closed-loop system and the convergence of the detection observer. Finally, the developed robust fault-tolerant control scheme is applied to the longitudinal model of an aircraft and simulation results are presented to illustrate the effectiveness of the proposed control scheme.
longitudinal dynamics; input saturation; detection observer; fault-tolerant control; aircrafts
0 Introduction
With the development of aircraft technology in recent years, the performance requirements for complexly advanced aircraft, such as the military fighter and the civil aircraft have increased, and their associated control system have become more complicated. Thus, the design of flight control system for the aircraft is a critical and challenging work[1]. Unexpected faults such as the failure, loss of effectiveness or the aging inevitably occur in actuators and sensors of the practical system because of the various work environment[2], which may change system behavior, and if fault-tolerance capability is not considered in the process of control design, actuator or sensor faults will cause control performance degradation, system instability and even aircraft loss of control[3]. Therefore, fault-tolerant capability drawn by the need of aircraft safety and reliability is one of the most important problems that should be explicitly considered in the control design. In addition, the nonlinear system usually possess unmodelled dynamics, modeling error, system parameter perturbations, and other uncertainties[4-8]. Generally speaking, the control performance is severely affected by uncertainties[9-10]. Therefore, it is meaningful and necessary to develop efficient fault-tolerant control (FTC) methods against faults and uncertainties for practical applications.
The past two decades have seen a rapid growing interest in FTC and the development of several designed methods on the FTC problem[11]. There are generally two main methods, i.e., passive FTC and active FTC. In the passive FTC method, the robust control scheme is designed to eliminate the effects of system faults regarded as external disturbances or a special kind of uncertainties. While the fault detection and diagnose (FDD) mechanism is adopted in the active FTC method to detect and identify the system faults[12]. Compared with the passive FTC method, the active FTC can achieve better tolerant control performance. Therefore, the active FTC method and its applications play an important role in FTC research. So far, many kinds of schemes for active FTC have been found in the literatures, for example, adaptive design[3], sliding mode observer design[13], neural network-based design[14]and so on. However, the active FTC methods applied to the aircraft should be further considered.
In recent years, the application on the aircraft has been published in many literatures. In Ref.[1], an adaptive fault-tolerant flight controller was developed for the F-16 aircraft model by estimating an eventual fault. In Ref.[15], a sliding-mode fault-tolerant control was presented for a civil aircraft with sensor fault. In Ref.[16], a multi-objective fault-tolerant output tracking control was investigated for the longitudinal model of a flexible air-breathing hypersonic vehicle (FAHV). In Ref.[17], a novel fault-tolerant attitude control based on sliding mode control was studied for a flexible spacecraft subject to actuator faults and uncertain inertia parameters. A hybrid fault-tolerant control system combining the passive and active FTC technologies was designed for an aircraft subject to different degree of loss of control effectiveness in Ref.[18]. In Ref.[19], a fault tolerant attitude tracking controller based on backstepping technology was developed for flexible spacecraft subject to actuator effectiveness fault. In Ref.[20], a trajectory tracking fault tolerant control (FTC) scheme was proposed for a vertical takeoff and landing (VTOL) aircraft with external disturbances and actuator faults. Although most of the existing research results consider the system faults and uncertainties, actuator saturation has not been seriously considered. Therefore, the control input saturation problem needs to be explicitly considered for the aircraft.
Actuator saturation is another critical problem that needs to be considered in the control system design for the logitudinal dynamics of an aircraft, especially in FTC system design. The reason is that the actuator outputs of the aircraft are inevitably subject to amplitudes or rates saturation constraints due to the physical characteristics of the actuators[19-21]. If the controller is designed without considering this kind of nonlinearity, actuator will quickly reach saturation due to the needed massive control effort to maintain control performance when actuator fault occurs. In this case, the unchanged control output will destroy the stability of the logitudinal dynamics, or even make the aircraft crashed[22-23]. Therefore, the input saturation problem has attracted a great deal of attention and various methods have been developed, such as positively invariant set method[24], sliding mode control[25], small-gain method[26], and so on. One of the most efficient methods for solving input saturation problem is the anti-windup technology[27-31]. The basic idea of anti-windup scheme is that introducing the anti-windup compensator will generate the signal based on the difference between the nominal control input and the actual control input. Then, the designed controller augmented with a compensator can eliminate the adverse effect of input saturation. In Ref.[28], an anti-windup scheme was proposed for a class of linear systems with input saturation. The LMI method for designing dynamic/static anti-windup compensators was presented to improve regional performance and stability of linear control systems with saturating actuators in Ref.[29]. In Ref.[30], a modified anti-windup control method was developed to solve the input saturation problem and applied to the forth order lateral dynamics of F16 aircraft. In Ref.[31], an anticipatory anti-windup scheme which can improve the closed-loop performance was developed, where the compensator is activated before the input saturation occurs because the level of the artificial saturation function is lower. However, the actuator or sensor fault problem has been rarely considered in almost existing research works on input saturation control. Thus, a control scheme will be developed for the system with unknown faults and input saturation in this paper.
Motivated by the above analysis, a robust fault-tolerant control scheme will be proposed for the longitudinal dynamics of an aircraft with input saturation, system uncertainties and actuator/sensor faults in this paper. To estimate the system fault, a detection observer is designed for the longitudinal dynamics. Based on the detection observer, a fault-tolerant control law is developed to compensate for the fault effects of the longitudinal dynamics. Meanwhile, to tackle the input saturation, a dynamic anti-windup compensator is designed and augmented into the fault-tolerant controller to ensure the stability of the closed-loop system and convergence of the detection observer.
1 Problem Formulation
According to Ref.[32], the longitudinal model of an aircraft can be linearized as the following uncertain multi-input and multi-output (MIMO) systems
(1)
wherexp∈Rnpis the state, u∈Rmis the control input, and yp∈Rpis the output. In the dynamics model of the aircraft, np=4,m=2. g(t,xp) is a continuous nonlinear vector function. sat(·) represents the input saturation which is described as

(2)
Faults are described by the vector f∈Rq, assumed to be zero prior to the failure time, non-zero and differentiable after the fault occurrence. Ap,B1,B2,C,D are the appropriate dimensional constant matrices.ΔA represents the parametric uncertainties of system (1), which is assumed to satisfy the following form
(3)

(4)
To proceed the fault-tolerant control design, the following assumptions and lemma for the given system (1) are required[33]
Assumption 1(Ap,B1) is stabilizable, (Ap,C) is observable.


(5)
In this paper, the control objective is that the fault-tolerance control law and anti-windup compensator using detection observer will be designed for uncertain systems (1) with input saturation and faults such that the closed-loop system is asymptotical stable. To diagnose the faults, a detection observer is proposed to estimate the fault. Then, considering the anti-windup compensator, a fault-tolerant control law based on the detection observer is designed to ensure the stability of the closed-loop system and the convergence of the detection observer.
2 Detection Observer Design
In this section, a detection observer is developed to estimate the fault of the system (1). To detect the fault, the following observer is constructed[35].
(6)
The estimate errors are defined as
(7)
Considering Eqs.(1,6), the estimate error and output error equations can be written as
(8)

Under the Assumption 1, we can know that (Ap,C) is detectable. Thus, the gain matrix L can be chosen such that Ap+LC is a stable matrix. Furthermore, the design of the gain matrices L, M, N and the convergence of the detection observer will be discussed in the next section.
3 Fault-Tolerant Control and Anti-windup Compensator Design Based on Detection Observer
In this section, we will proceed the design of fault-tolerant control law and anti-windup compensator based on the detection observer. For the convenience of the control design, the fault-tolerant control law design will be integrated with anti-windup compensator design.
To achieve the closed-loop performance specifications in the absence of the input saturation, the fault-tolerant controller is designed as[3]
(9)
where K1is the state feedback design gain matrix, K2is the fault-tolerant term to decrease the effect of the fault. To eliminate or decrease the effect on the closed-loop system in the event of input saturation, an anti-windup compensator is designed as
(10)
where xa∈Rnais the anti-windup state, q=sat(u)-u is the input of the anti-windup compensator, and v is the output of the anti-windup compensator. The matrices Aa,Ba,Ca,Daare of suitable dimensions.
Adding the compensator to the fault-tolerant controller, we have
(11)
Substituting the control law (11) into the system (1) yields
(12)
Invoking Eqs.(7—9), the closed-loop system can be described as
(13)
We choose a Lyapunov function as
(14)
where P1,P2,P3,P4are all definite-positive matrices. Prior to the stability of the closed-loop system, we define the variables w and z as
(15)
The design objective of the fault-tolerant control law and anti-windup compensator is not only to ensure the stability of the stability and convergence of the detection observer, but also to minimize the L2gainμfrom w to z, where μ>0[36].
Considering Eq.(14) and the design objective, we obtain
(16)
Thus, based on Eq.(13), it is obtained that
(17)
Invoking the Lemma 1, we have


(18)
where α1,α2,α3,α4are the positive constants.
Substituting Eq.(18) into Eq.(17) yields
(19)
The above inequality (19) can be written as
(20)
where
(21)

(22)
Eq.(22) can be rewritten as
(23)
where
(24)
According to the Schur complement theorem, we obtain that if the following LMI holds
(25)
then the inequality Eq.(16) can be satisfied.
Considering the convergence of the closed-loop system and detection observer, we can obtain the following theorem.
Theorem 1For a given positive constant α1, matrix Ca∈Rm×na, if there exist positive constantsα2,α3,α4,μ, matrices

Theorem 1 can be easily proved according to the inequalities (20,25).
4 Simulation Results
In this section, the developed fault-tolerant control scheme will be applied to the longitudinal model of the F-16 with multi-axis thrust vectoring (MATV)[32,37]and the simulation results will be given to demonstrate its effectiveness. The longitudinal dynamics of F-16 characterized by Eq.(1) is used in our simulation. xp=[q,α,V,γ]Tis the states of system which represent pitch rate, angle of attack, velocity and flight-path angle, respectively. u=[δe,δT]Tis control input which are the elevator deflection and thrust respectively, and the saturation level of the input umax=[25,10]T. Parameter matrices are given by
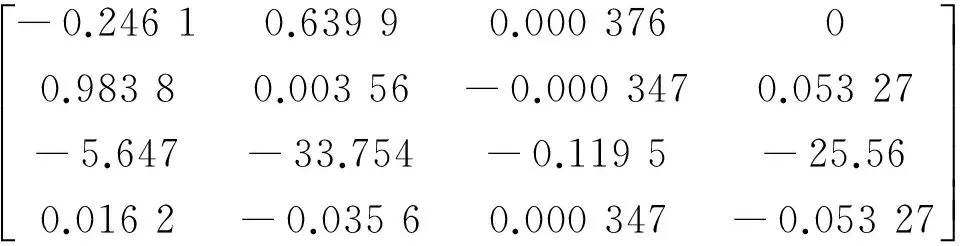
E1=0.2I4


by solving Eq.(23), we have
K1=

L=
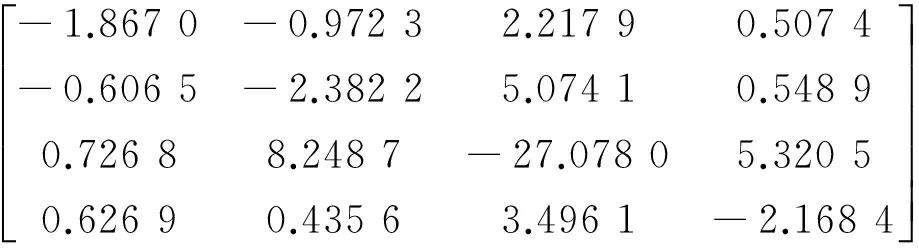
N=[36.8,152,7.778,14.73],α2=0.032 6,μ=18.636 7
Aa=

Ba=


The initial state values are
x0=[1,0.375,40,1]T, the detection observer, anti-windup compensator and fault-tolerant controller are designed according to Eqs.(6, 10, 11).
The time-varying fault is considered, which is generated as follows

(26)
Under two different controllers, namely, the fault-tolerant controller Eq.(11) based on the detection observer Eq.(6), the anti-windup compensator Eq.(10) and the traditional fault-tolerant controller without anti-windup compensator, the simulation results are shown in Figs.1—3. It can be seen from Fig.1 that the fault detection observer can estimate the system fault with small error. At the same time, the states of the closed-loop system are asymptotically stable with varying-time fault, input saturation and system uncertainties under the designed robuste fault-tolerant controller from Fig.2. However, the states fluctuate wildly with steady-state eorrors under the traditional fault-tolerant controller without anti-windup compensator. In addition, Fig.3 shows that the actuators did not exceed the input
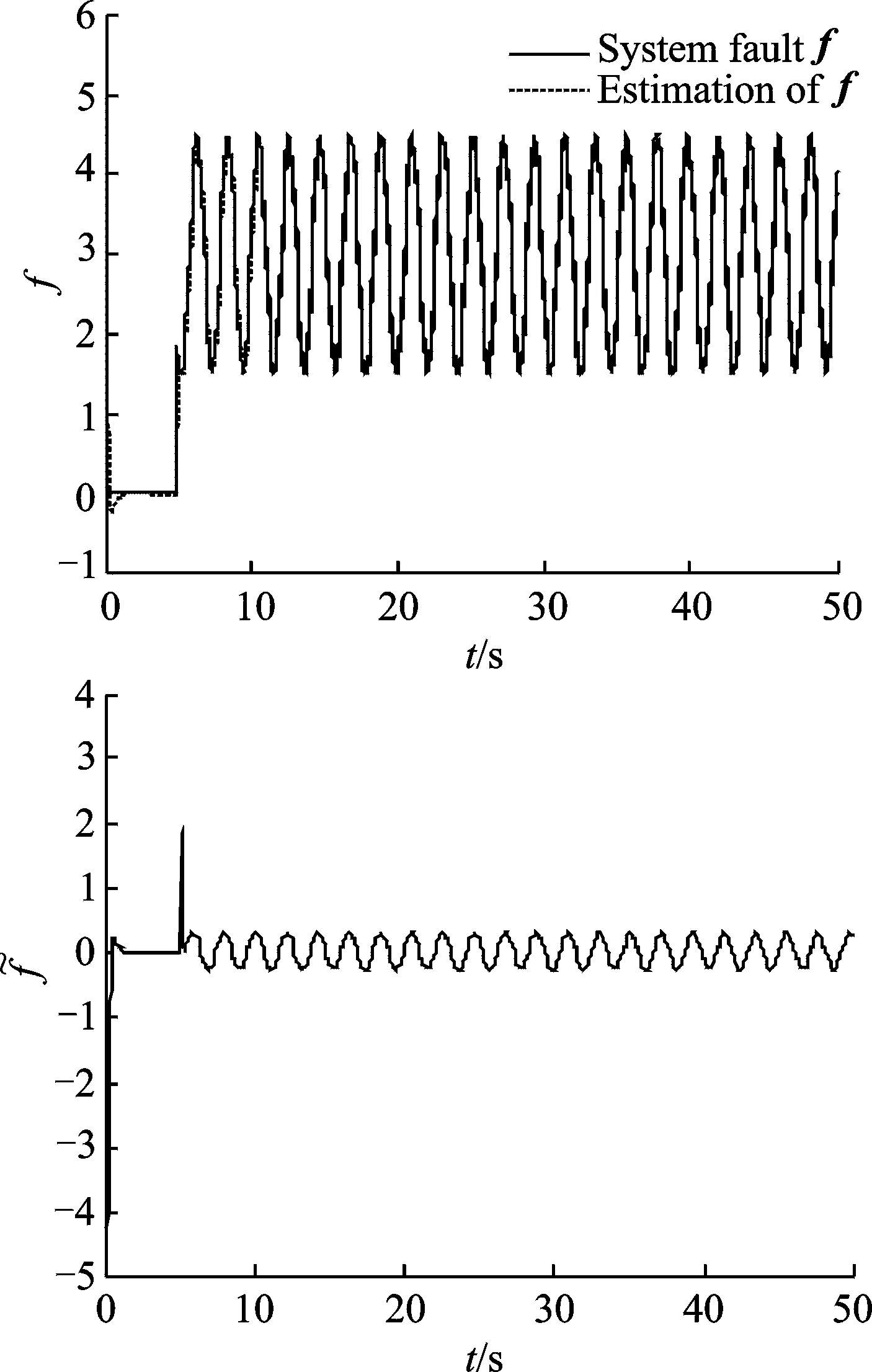
Fig.1 Responses of fault f, estimate and estimate error
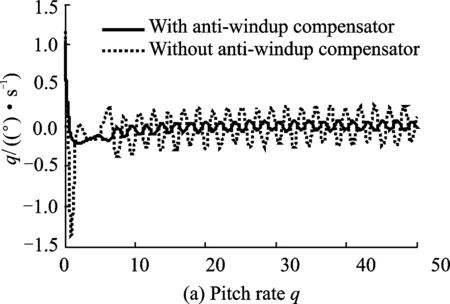
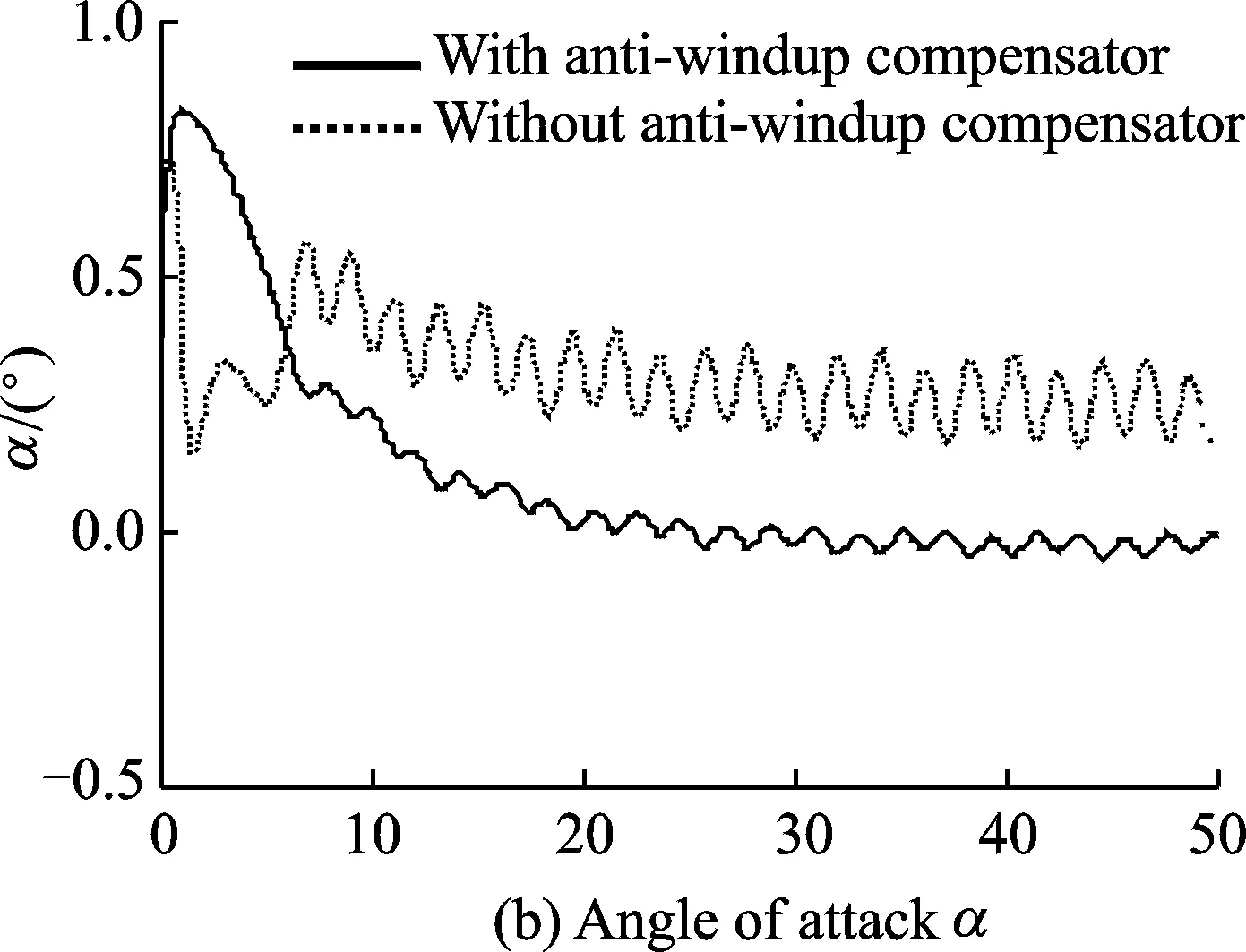
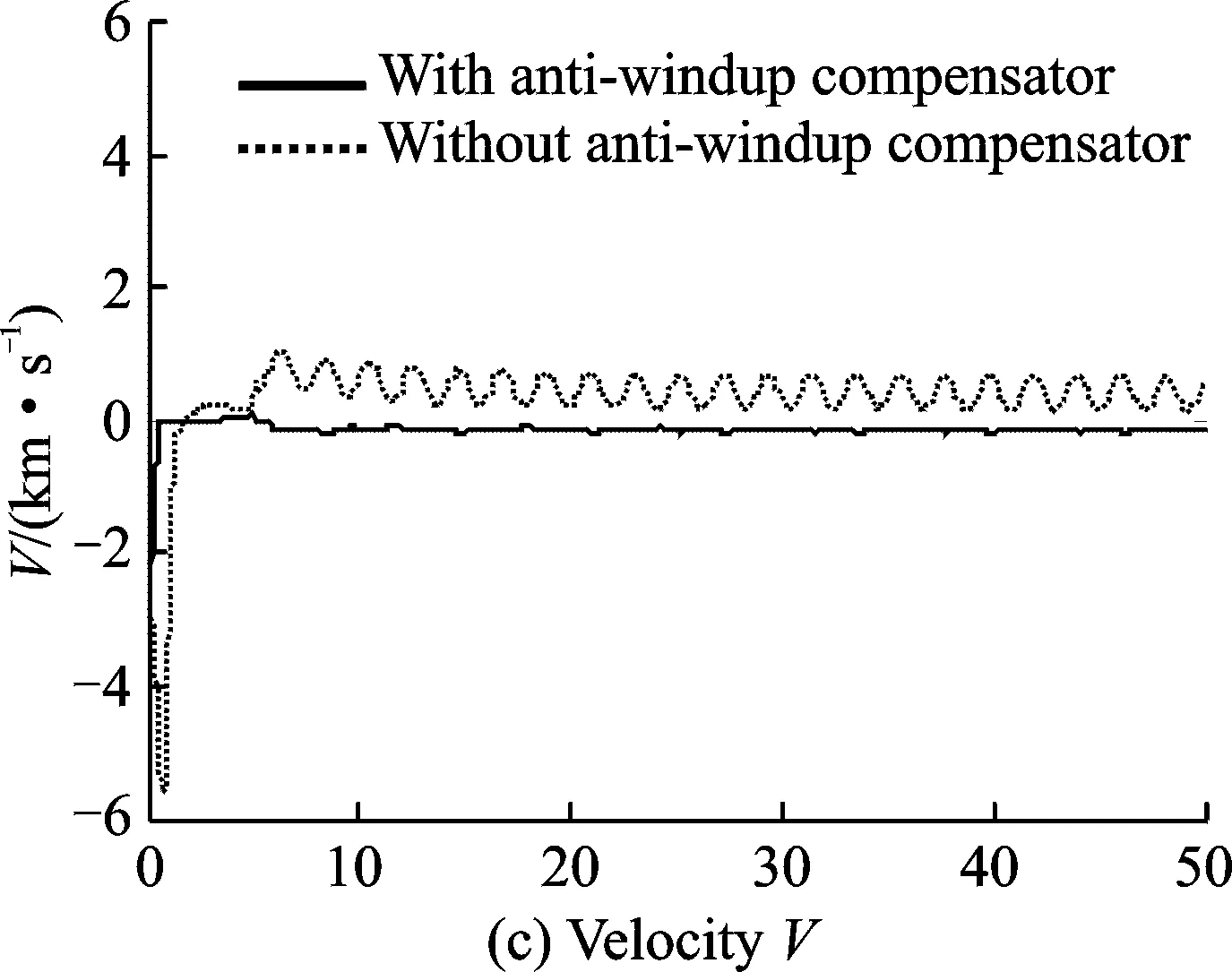
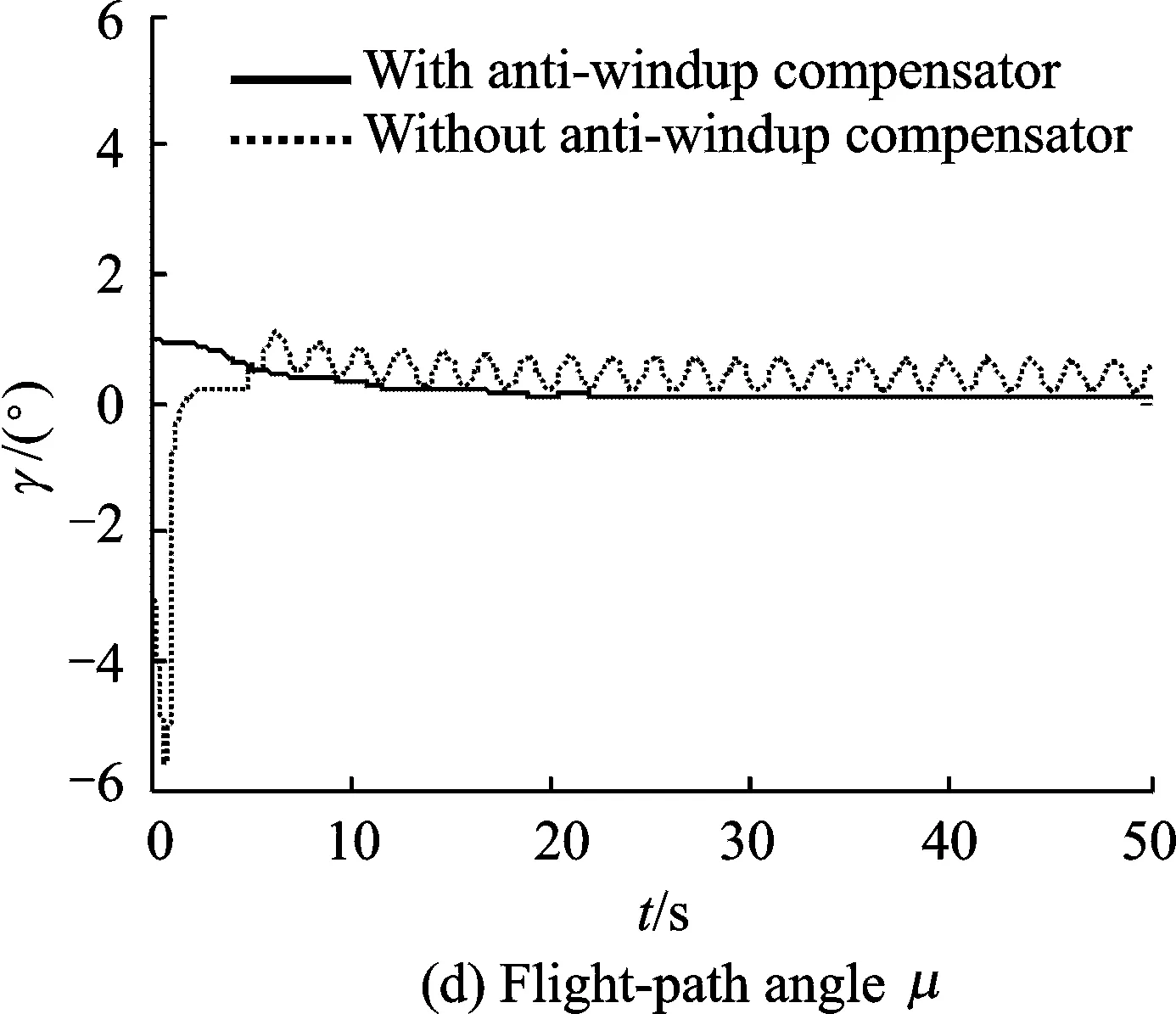
Fig.2 Responses of the system states with two different controllers
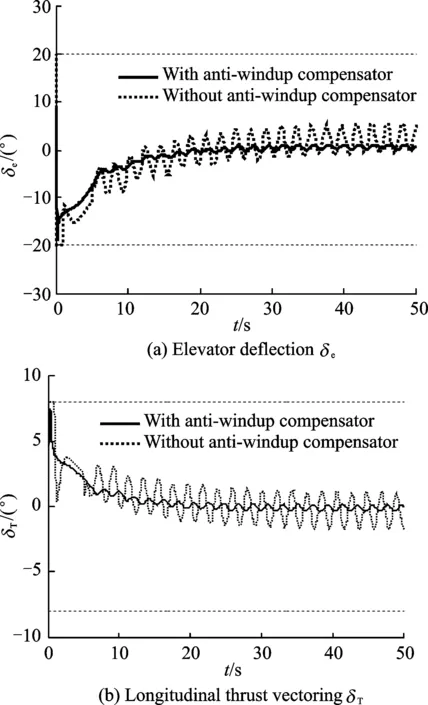
Fig.3 Responses of control input with two different controllers
limitation under the control of Eq.(8) and achieves better transient and steady-state performances than that of the traditional controller. Thus, contrast results prove the effectiveness of the developed control scheme in the presence of varying-time fault and input saturation.
From the above simulation results, we can know that the developed fault-tolerant scheme is valid for the longitudinal model of F-16 with input saturation and time-varying fault.
5 Conclusions
A robust fault-tolerant control scheme based on the anti-windup and detection observer technology has been proposed for the longitudinal dynamics of an aircraft subject to input saturation, parametric uncertainties and unknown faults. Using the fault detection observer to estimate the system fault, a robust FTC has been developed to isolate the fault. Meanwhile, to solve the input saturation problem, an anti-windup compensator has been proposed and augmented into the FTC. Finally, the control method has been applied to the longitudinal model of an aircraft to illustrate the effectiveness of the proposed control scheme. The simulation results manifest the effectiveness of the designed robust FTC scheme. The future direction is to extend the anti-windup method to nonlinear systems.
Acknowledgements
This work was supported by the National Natural Science Foundations of China (No. 61573184, 61374212), the Natural Science Foundation of Jiangsu Province, China (No. SBK20130033), the Specialized Research Fund for the Doctoral Program of Higher Education (No. 20133218110013), and the Six Talents Peak Project of Jiangsu Province of China (No. 2012CXXRJ-010).
[1]YE Dan, YANG Guanghong. Adaptive fault-tolerant tracking control against actuator faults with application to flight control[J]. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1088-1096.
[2]ZHANG Xiaodong, PARISINI T, POLYCARPOU M M. Adaptive fault-tolerant control of nonlinear uncertain systems: An information-based diagnostic approach[J]. IEEE Transactions on Automatic Control, 2004, 49(8): 1259-1274.
[3]JIANG Bin, STAROSWIECKI M, COCQUEMPOT V. Fault accommodation for nonlinear dynamic systems[J].IEEE Transactions on Automatic Control, 2006, 51(9): 1578-1583.
[4]YANG Jun, CHEN Wenhua, LI Shihua. Non-linear disturbance observer-based robust control for systems with mismatched disturbances/uncertainties[J]. IET Control Theory & Applications, 2011, 5(18): 2053-2062.
[5]LI Hongyi, ZHOU Qi, CHEN Bing, et al. Parameter-dependent robust stability for uncertain Markovian jump systems with time delay[J]. Journal of the Franklin Institute, 2011, 348(4): 738-748.
[6]LIU Yanjun, TONG Shaocheng, CHEN C L P. Adaptive fuzzy control via observer design for uncertain nonlinear systems with unmodeled dynamics[J]. IEEE Transactions on Fuzzy Systems, 2013, 21(2): 275-288.
[7]CHEN Fuyang, JIANG Bin, TAO Gang. Direct self-repairing control for helicopter via quantum control and adaptive compensator[J]. Trans Nanjing Univ of Aero Astro, 2011, 28(4): 337-342.
[8]JIANG Bin, ZHAO Jing, QI Ruiyun, et al. Survey of fault diagnosis and fault-tolerant control for Near space vehicle[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2012, 44(5): 603-610.(in Chinese)
[9]LIU Yanjun, TONG Shaocheng, WANG Wei. Adaptive fuzzy output tracking control for a class of uncertain nonlinear systems[J]. Fuzzy Sets and Systems, 2009, 160(19): 2727-2754.
[10]LI Hongyi, JING Xingjian, LAM H K, et al. Fuzzy sampled-data control for uncertain vehicle suspension systems[J]. IEEE Transactions on Cybernetics, 2014, 44(7): 1111-1126.
[11]CHEN Fuyang, LU Feiei, JIANG Bin, et al. Adaptive compensation control of the quadrotor helicopter using quantum information technology and disturbance observer[J]. Journal of the Franklin Institute, 2014, 351(1): 442-455.
[12]CHEN Fuyang, JIANG Bin, TAO Gang. Fault self-repairing flight control of a small helicopter via fuzzy feedforward and quantum control techniques[J]. Cognitive Computation, 2012, 4(4): 543-548.
[13]LI Hongyi, GAO Huijun, SHI Peng, et al. Fault-tolerant control of Markovian jump stochastic systems via the augmented sliding mode observer approach[J]. Automatica, 2014, 50(7): 1825-1834.
[14]DU Zhimin, JIN Xinqiao, YANG Yunyu. Fault diagnosis for temperature, flow rate and pressure sensors in VAV systems using wavelet neural network[J]. Applied Energy, 2009, 86(9): 1624-1631.
[15]ALWI H, EDWARDS C. Fault detection and fault-tolerant control of a civil aircraft using a sliding-mode-based scheme[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 499-510.
[16]LI Hongyi, WU Ligang, SI Yan, et al. Multi-objective fault-tolerant output tracking control of a flexible air-breathing hypersonic vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2010, 224(6): 647-667.
[17]HU Qinglei, XIAO Bing. Fault-tolerant sliding mode attitude control for flexible spacecraft under loss of actuator effectiveness[J]. Nonlinear Dynamics, 2011, 64(1-2): 13-23.
[18]YU Xiang, JIANG Jin. Hybrid fault-tolerant flight control system design against partial actuator failures[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 871-886.
[19]XIAO Bing, HU Qinglei, ZHANG Youmin. Adaptive sliding mode fault tolerant attitude tracking control for flexible spacecraft under actuator saturation[J]. IEEE Transactions on Control Systems Technology, 2012, 20(6): 1605-1612.
[20]CHEN Mou, CHEN Wenhua, WU Qingxian. Adaptive fuzzy tracking control for a class of uncertain MIMO nonlinear systems using disturbance observer[J]. Science China Information Sciences, 2014, 57(1): 1-13.
[21]CHEN Mou, REN Beibei, WU Qingxian, et al. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer[J]. Science China Information Sciences, 2015, 58(7): 1-12.
[22]CHADLI M, AOUAOUDA S, KARIMI H R, et al. Robust fault tolerant tracking controller design for a VTOL aircraft[J]. Journal of the Franklin Institute, 2013, 350(9): 2627-2645.
[23]XU Bin, HUANG Xiyuan, WANG Danwei, et al. Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation[J]. Asian Journal of Control, 2014, 16(1): 162-174.
[24]CAO Yongyan, LIN Zongli, HU Tingshu. Stability analysis of linear time-delay systems subject to input saturation[J]. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 2002, 49(2): 233-240.
[25]HU Qinglei, MA Guangfu, XIE Lihua. Robust and adaptive variable structure output feedback control of uncertain systems with input nonlinearity[J]. Automatica, 2008, 44(2): 552-559.
[26]LI Yongmin, TONG Shaocheng, LIU Yanjun, et al. Adaptive fuzzy robust output feedback control of nonlinear systems with unknown dead zones based on a small-gain approach[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(1): 164-176.
[27]CAO Yongyan, LIN Zongli, WARD D G. An antiwindup approach to enlarging domain of attraction for linear systems subject to actuator saturation[J]. IEEE Transactions on Automatic Control, 2002, 47(1): 140-145.
[28]GRIMM G, HATFIELD J, POSTLETHWAITE I, et al. Antiwindup for stable linear systems with input saturation: an LMI-based synthesis[J]. IEEE Transactions on Automatic Control, 2003, 48(9): 1509-1525.
[29]HU Tingshu, TEEL A R, ZACCARIAN L. Regional anti-windup compensation for linear systems with input saturation[C]∥Proceedings of the 2005 American Control Conference.[S.l.]: IEEE, 2005: 3397-3402.
[30]SAJJADI-KIA S, JABBARI F. Modified anti-windup compensators for stable plants[J]. IEEE Transactions on Automatic Control, 2009, 54(8): 1934-1939.
[31]WU Xiongjun, LIN Zongli. On immediate, delayed and anticipatory activation of anti-windup mechanism: Static anti-windup case[J]. IEEE Transactions on Automatic Control, 2012, 57(3): 771-777.
[32]GAO Zhifeng, JIANG Bin, Fault accommodation for a class of l inear time-varying systems with parametric uncertainties[J]. Systems Engineering and Elect ronics, 2009, 31(12): 2924-2928.
[33]BATES D, HAGSTR?M M. Nonlinear analysis and synthesis techniques for aircraft control[M]. Germany: Springer, 2007.
[32]CHEN Mou, CHEN Wenhua. Disturbance-observer-based robust control for time delay uncertain systems[J]. International Journal of Control, Automation and Systems, 2010, 8(2): 445-453.
[34]CHENG Guoyang, PENG Kemao. Robust composite nonlinear feedback control with application to a servo positioning system[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 1132-1140.
[35]JIANG Bin, CHOWDHURY F N. Parameter fault detection and estimation of a class of nonlinear systems using observers[J]. Journal of the Franklin Institute, 2005, 342(7): 725-736.
[36]HONEYWELL, LOCKHEED M. Multivariable control design guidelines: Final Report, WL-TR-96-3099[R]OH, U.S.A.: Wright Patterson AFB,1996.
Dr. Yang Qingyun received his B.Sc. degree in Measuring and controlling technology and instrument at Jiangsu University of Science and Technology, Zhenjiang, China, in 2008, the M.Sc. degree in Pattern recognition and intelligent system from Nanjing University of Aeronautics & Astronautics (NUAA), Nanjing, China, in 2011, and the Ph.D. degree in Control theory and control engineering at NUAA in 2016. His research interests include nonlinear control and flight control.
Prof. Chen Mou is currently a professor of the College of Automation Engineering in NUAA. He received his B.Sc. degree in Material science and engineering at NUAA, Nanjing, China, in 1998, the M.Sc. and the Ph.D. degree in Automatic control engineering at NUAA in 2004. He was an Academic Visitor at the Department of Aeronautical and Automotive Engineering, Loughborough University, UK, from November 2007 to February 2008. From June 2008 to September 2009, he was a research fellow in the Department of Electrical and Computer Engineering, the National University of Singapore. He was a senior Academic Visitor at the School of Electrical and Electronic Engineering, the University of Adelaide, Australia, from May 2014 to November 2014. His research interests include nonlinear system control, intelligent control, and flight control.
(Executive Editor: Zhang Tong)
, E-mail address:chenmou@nuaa.edu.cn.
How to cite this article: Yang Qingyun, Chen Mou. Robust fault-tolerant control for longitudinal dynamics of aircraft with input saturation[J]. Trans. Nanjing Univ. Aero. Astro., 2016, 33(3):319-328.
http://dx.doi.org/10.16356/j.1005-1120.2016.03.319
TP273Document code: AArticle ID: 1005-1120(2016)03-0319-10
 Transactions of Nanjing University of Aeronautics and Astronautics2016年3期
Transactions of Nanjing University of Aeronautics and Astronautics2016年3期
- Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Behavior of Corrosion-Repaired Concrete Beams Reinforced by Epoxy Mortar
- Model Updating for High Speed Aircraft in Thermal Environment Using Adaptive Weighted-Sum Methods
- Removing Random-Valued Impulse Noises by a Two-Staged Nonlinear Filtering Method
- Numerical Calculations of Aerodynamic and Acoustic Characteristicsfor Scissor Tail-Rotor in Forward Flight
- DNS Study on Volume Vorticity Increase inBoundary Layer Transition
- Stiffness Distribution and Aeroelastic Performance Optimization of High-Aspect-Ratio Wings