
Goal-Oriented Control Systems (GOCS):From HOW to WHAT
2024-04-15 09:36:30ByWenHuaChen
By Wen-Hua Chen ,,
This work was supported by the UK Engineering and Physical Sciences Research Council (EPSRC) Established Career Fellowship “Goal-Oriented Control Systems: Disturbance, Uncertainty and Constraints” (EP/T005734/1).
Citation: W.-H.Chen, “Goal-oriented control systems (GOCS): From HOW to WHAT,”IEEE/CAA J.Autom.Sinica, vol.11, no.4, pp.816–819,Apr.2024.
W.-H.Chen is with the Department of Aeronautical and Automotive Engineering, Loughborough University, Leicestershire, LE11 3TU, U.K.(email: W.Chen@lboro.ac.uk).
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JAS.2024.124323
Brief: New control theory is required to underpin safe design and deployment of future highly automated systems to deal with uncertain environments and complicated tasks, enabled by AI and other advanced technologies.Goal-Oriented Control Systems offer potential to transform the control system design from currently instructing a control system how to perform a task to specifying what is to be achieved.
I.HIGH-LEVELS OF AUTOMATION (HLA)
Driverless cars, unmanned aerial vehicles, healthcare robots looking after elder and disabled people at home, fully automated factory and warehouse, these are hot topics appearing on our news and social media daily, and hotly discussed/debated on our dinner tables.These systems are some typical examples of high-levels of automation(HLA) systems enabled by artificial intelligent (AI) and other latest technologies.Our society, the public and the government have a high aspiration of these highly automated systems as they hold huge potential in opening new products and new services, revolutionising our living and society.But are we ready to embrace these future systems and move into a highly automated society? Are they safe?
Automation such as production lines in manufacturing has dramatically increased the productivity and wealth of our society.However,the current automation is only able to perform repeated tasks in a controlled environment and under a well pre-defined condition.In HLA such as autonomous driving and unmanned aerial vehicles, it is essential that an automation system is able to respond to changes of environments, goals and events in a timely and rational way with a reduced level of human intervention when performing assigned tasks.Automatically performing tasks in an unknown or uncertain environment is difficult and challenging, which demands a high level of intelligence and autonomy to make a decision based on observed information [1].It would be even more challenging if the aim is to perform a task in an optimal way in terms of a defined criterion, e.g.,productivity or efficiency.
HLA, rather than autonomy, is mainly adopted and advocated in this article although it will not explicitly distinguish the terminology of HLA and autonomy.This is because HLA highlights the incremental nature of automation, starting from current low levels of automation.It also emphasises the fact that human involvement is necessary in most of cases (as a supervisor, manager or adviser)although its involvement decreases with the increase of the level of automation.Ultimately (full) autonomy is achieved where a system is able to make its own decisions and to act on its own, and to do both without direct human intervention.The above thinking is also reflected in the recent change of the terminology in automotive sector fromautonomous vehiclestoautomated vehicles[2].In the scale of driving automation defined by the Society of Automotive Engineers, the highest level, Level 5 Full Driving Automation, can be considered as autonomy in many senses.
II.GOAL-ORIENTED CONTROL SYSTEMS (GOCS)
Control theory plays a central role in the development and deployment of current automated systems.It provides systematic and rigorous design and analysis processes to ensure the performance and stability of the resultant control systems.When moving from current low levels of automation to HLA, the current control theory is not adequate since it cannot provide analysis and design support for driverless cars and unmanned aircraft systems as it does for low levels of automation.The complexity of the algorithms (embedded AI functions), the challenges arising in dealing with unknown or uncertain environments, and the complexity of the system specifications demand new control theory to support future highly automated systems.
To respond this need, a goal-oriented control systems (GOCS)framework was recently proposed (see Fig.1) [3].It attempts to shift the control system design paradigm from “How” to “What”.In a typical classic control structure (Fig.2), a control system is designed to follow a set point or track a reference specified by the designer.This is why quite often the control system design is formulated as tracking or regulation problems.The designer instructs the control system“how” to achieve a goal (e.g, , saving energy or increase productivity) through carefully synthesising a desirable operation condition(e.g., set point) or a profile (trajectory, or sequence of actions) and passing to the control system to execute.In a GOCS framework, the designer specifies high-level goals (“what”) and constraints (e.g., in safety or resources), and it is up to GOCS to find what is the best way (“how”) to achieve the goals while satisfying all the constraints.
We can elaborate the difference in these two types of design philosophy using a daily example.Consider a situation that a manager asks a member in their team, referred asagenthereafter, to go to Nanjing from Beijing to perform a task.In the current control system design approach, the manager needs to instruct the agent “how” to reach a specified location in Nanjing from their current location in every detail; including going to a Beijing train station using which means of transport (taxi, bus, underground) and the corresponding departure time, which specific train at what time shall be taken to Nanjing, and how to reach the specific destination from the Nanjing train station, etc.It is in a similar way as parents instruct a young child.Then the agent follows the travel plan closely in every detail.But what happens if there is any unexpected event or variations (e.g.,bus or train cancelled or delayed)? In the goal-oriented approach, the high-level goal (i.e., go to a specific location in Nanjing) and the constraints (e.g., the deadline for the agent to reach the destination and the available budget) are specified.It is up to the agent to work out what is the best way (e.g., “how”) to complete the travel based on all available information.
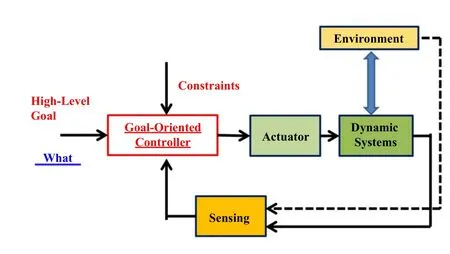
Fig.1.Goal-oriented control system (GOCS) diagram where the system specifications are given in terms of high-level goals so it promotes goal-oriented behaviour.
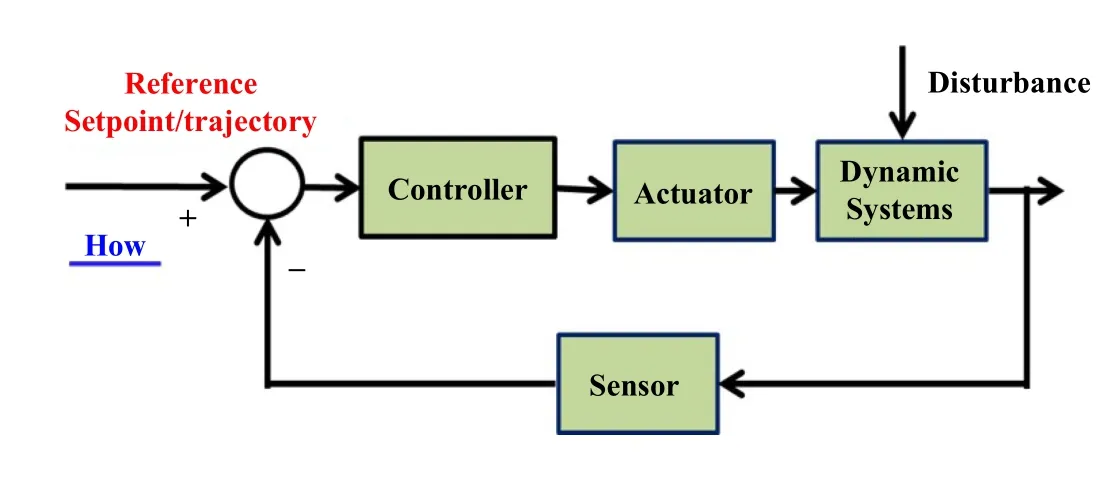
Fig.2.Classic control system diagram where how to perform a task is specified in terms of a defined set point or reference.
Clearly the GOCS approach requires the agent has a higher level of intelligence and competence, and consequently the agent also has a higher level of automation or autonomy.Based on the specifications and the knowledge of the traffic environments, the agent himself works out the most suitable travel plan, such as selecting the means of transport from Beijing to Nanjing, e.g., taking train or flight, or driving, and selecting bus, underground or taxi for local travel and deciding the corresponding departure time.If there is any interruption on the travel plan, such as delay or cancellation in bus, underground or train/flight, the agent would re-plan the travel based on updated traffic information and the constraints in resources and time.
More importantly, this approach also empowers the agent with the capability to seek and take advantage of opportunities that may arise due to the change of the environment [4].For example, someone may happen to drive to the Beijing train station so a lift could be given to the agent, or there is a significant discount in the flight ticket, or the bus arriving in the train station much more quickly than planned due to a lighter traffic condition so an earlier train could be boarded.In contrast, according to the current control design approach, the agent just follows the travel plan instructed by the manager without taking advantages of these opportunities.This example also illustrates the key differences and benefits with increased levels of automation.Actually, a key feature in the measure of the levels of intelligence and autonomy is goal-oriented behaviour [1].
In addition to the fundamental shift in the design philosophy from“how” to “what”, there are several key differences between the classic control diagram of Fig.2 and GOCS of Fig.1.
1)Specifications in Control Design: The objective/task in the current control systems are generally quite simple.Typically they are formulated as a tracking or regulation problem by specifying a set point or reference.Performance metrics or criteria are defined based on or derived from them, and used for system performance specifications; for example, overshoot, rising time and steady error in the time domain,bandwidthanddampingratiointhefrequency domain,or a performanceindextobeoptimisedlikeinLQRorH∞.However,with the increase of the levels of automation, more and more complicated tasks have to be completed by a control system.This limitation becomes one of the main bottlenecks in applying the current control analysis and design techniques into HAL.Consider the specification of an emergency system as “the system must be shut down in 10 seconds after an alarm goes off unless all clear is sounded first”.The current control theory is even difficult to cope with this type of simple task as it lacks of a suitable representation of this specification that can be integrated with a dynamic model of the system mathematically.It shall be noted that some existing control techniques such as extremum seeking [5] or economic model predictive control [6] are able to deal with more complicated tasks or high-level goals but still quite limited.Formal methods and mathematical representations are required to specify complicated tasks or high-level goals in GOCS.Recent progress in temporal logic control shows promising in specifying high-level goals where formal methods in computer science like various types of temporal logic languages are used for control system specifications [7], [8].
2)The Use of Constraints: Constraints play a core role in GOCS.There are a wide range of constraints that must be taken into account when generating a control action.Some come from physical constraints, but other from a much wider context such as safety,resources, legality, even culture or ethic considerations.The latest is particularly important in currently advocated human centre engineering design.All constraints must be carefully captured and represented mathematically, so only meaningful control actions would be generated.In the travelling example above, the constraints on the deadline and the budget must be clearly specified in order to generate a sensible/acceptable travel plan.These constraints are explicitly or implicitly considered in the current control design approach by the control system designer through carefully synthesising a set-point or reference trajectory.Furthermore, most of the existing control design techniques cannot take into account state/control constraints explicitly, except a few like model predictive control.GOCS aims to automate the process of finding the optimal operational condition or profile by replacing human involvement so as to increase the levels of automation.That is, “what” shall be achieved is specified in GOCS and “how” to achieve it is decided by the control system itself.Without explicitly specifying necessary constraints, the control action or decision made by GOCS could be irrational, or even violate safety.
3)The Importance of Environment: One of the key features of HAL is that it may operate in a (partially) unknown or uncertain environment so it is important to understand, learn and cope with the environment in a best possible way.Therefore, environment modelling, sensing and understanding become an integrated part of GOCS.When generating a control action, not only the system dynamics but also the environment must be taken into account in achieving specified goals and satisfying constraints.In the current control theory, the influence of the environment is mainly represented by disturbance, or changes in the parameters of the system dynamics, which is either overly simplified or could not fully reflects the environment influence.Consequently, one central objective in the current control system design is to reject the influence of the disturbance.However, HAL aims not only to reduce the influence of the environment on its performance, but more importantly to work with and negotiate with the environment and other stakeholders.For example, in autonomous vehicles, the control system must adopt to the change of the traffic conditions and give way to other vehicles/pedestrians as appropriate.
There are many challenges in moving from the current control system configuration to the proposed GOCS framework.New mathematical formulations are required and correspondingly technical tools for analysis and design are necessary.For example, temporal logic or other formal methods can be used to represent high-level system specifications and complex constraints.Combining them with the powerful capability of the existing mathematical representations of system dynamics offers a promising way of formulating complicated tasks for a dynamic system in GOCS, however new analysis and design techniques are required for designing this type of new control systems.On the other side, since a control action or decision must be made based on the perception and real-time updated information, AI algorithms are widely used to develop advanced functions required in dealing with dynamic and uncertain environments.How to abstract the behaviour of an AI enabled function and understand its influence on achieving high-level goals and satisfying constraints is a big challenge.Actively exploring the operational environment to learn it quickly and adapting to it is another challenge.There are an initial progress in some areas such as temporal logic control and planning[9], [10], model checking and other formal methods in verifying and synthesising stability and safety of a complicated logic system [7],[8], and reinforcement learning in unknown environments [11], [12].Recently dual control for exploitation and exploration (DCEE) was proposed to design GOCS specifically in dealing unknown environments [3], [13] with active learning capability.Disturbance rejection is always a key objective in the current control system design.However disturbance may benefit in achieving high-level goals and give new opportunities.MPC with disturbance preview provides a promising approach to investigate how to make use of the information of disturbance to improve goal-oriented operation [14].These techniques could be used to support and realise the concept of GOCS but much more research is required.
III.GOCS FOR DRIVING AUTOMATION
Now let us illustrate the GOCS concept using automated vehicles.Decision making is largely rule/scenario-based in the current automated vehicles while AI algorithms are widely used in perception including computer vision, object classification, and comprehension of the intention of other road users [15].With the help of rich human driving experience (corner cases, corresponding actions/decision),the designer teaches the onboard computer “how” to react to the change of the environment by setting up various rules.Once a situation is determined, a corresponding rule is implemented to generate and execute a decision so human driving behaviour is naturally mimicked.However, there are numerous events on road with a very low probability [16].What happens if an autonomous vehicle encounters a scenario that is not considered in the design stage? The high-level goal of driving automation is actually quite simple, i.e., reaching a place quickly while driving safely.In the GOCS design philosophy, a best or most appropriate control action is chosen to realise the goal based on all available information and current belief.It makes sure that any chosen action must satisfy all the constraints (safety, legal,ethic, culture, etc.).In the presence of an unseen event/scenario, a most suitable action is selected against the goal and constraints so only actions that make sure safety is respected would be considered as feasible.GOCS moves away from the rule/scenario based design approach and reduces the following-on verification and validation effort.
The discussion made above can be further illustrated by autonomous overtaking as in Fig.3.Consider the situation that a vehicle is driving on a country road with a single lane on each direction (in an UK transport system).There is a vehicle parking on the lane and the ego vehicle needs to overtake the parking vehicle from its right side.This implies that the overtaking vehicle has to drive on the opposite lane for a while and must give way to any popping up incoming vehicles.The control diagram designed using GOCS is illustrated in Fig.3.The high-level goal is “overtaking the parking vehicle safely”.Other more details could be added such as “Do not hit the curbs on each side” and “only exceed the speed limit during the overtake for a short time”.The constraints imposed on GOCS include safe margin between the ego vehicle and any surrounding vehicle, road width,speed limit, sensor ranges, field view of the sensors, maximum acceleration or deceleration, acceptable steering angle or angular rate, and vehicle heading direction.
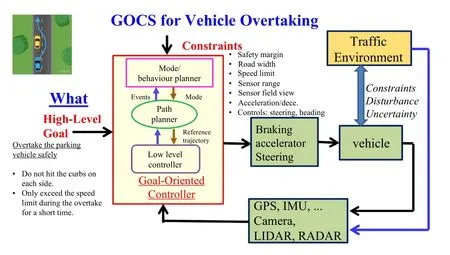
Fig.3.GOCS architecture for autonomous overtaking in a country road.
A goal-oriented controller is designed to perform the overtaking task safely while respecting all the constraints, taking into account the current vehicle dynamics and the information of the environment including speed and positions of any incoming vehicles.It consists of three layers.The mode/behaviour planner at the highest layer decides the best course of action to perform the overtaking task based on all available information about the dynamic system of the ego vehicle and the environment (e.g., traffic conditions and surrounding vehicles).Its decision such as overtaking or slowing down behind the parking vehicle passes to the next layer of the path planning that calculates the best possible path for executing the specified action (e.g.,slowing down behind the parking vehicle to wait for incoming vehicle pass, but do not be too close to hit the vehicle or block the field view of the ego vehicle’s sensors).The calculated trajectory is forwarded to the lowest layer of a vehicle control system as a reference for the vehicle to follow.The top layer of GOCS constantly re-evaluates its decision based on latest information of the traffic environment in the same fashion as using feedback in the classic control system.For example, an initiated overtaking manoeuvre may have to be abandoned since a new incoming vehicle is popping up unexpectedly.
The currently control theory is well positioned in designing controllers required in the lowest level and some of the middle level in the GOCS configuration (Fig.3), but much more research is required at the top level of decision making in order to realise GOCS.New models are required to describe the high-level behaviour of the vehicle and facilitate the development of its analysis and design tools for control systems.New approaches to abstract the low-level dynamics of the vehicles (e.g., position and velocity) and take them into account in the high-level decision making are also necessary.Finally for this multi-layer hierarchical control system, its safety/stability/performance analysis under a complicated dynamic traffic environment also requires much more research.
IV.CONCLUSION
This article explains the key motivation and the basic idea behind the newly proposed GOCS.The need of moving into high levels of automation and recent development in AI and data sciences impose grand challenges and opportunities in control system design, and the current control theory is not adequate.GOCS, as an attempt to addressing the challenges and exploiting the opportunities, advocates the change of the design philosophy from the current control system of instructing “how” to perform a task to “what” is required to achieve to promote goal-oriented behaviours.
 IEEE/CAA Journal of Automatica Sinica2024年4期
IEEE/CAA Journal of Automatica Sinica2024年4期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Parameter-Free Shifted Laplacian Reconstruction for Multiple Kernel Clustering
- A Novel Trajectory Tracking Control of AGV Based on Udwadia-Kalaba Approach
- Attack-Resilient Distributed Cooperative Control of Virtually Coupled High-Speed Trains via Topology Reconfiguration
- Synchronization of Drive-Response Networks With Delays on Time Scales
- Policy Gradient Adaptive Dynamic Programming for Model-Free Multi-Objective Optimal Control
- Lyapunov Conditions for Finite-Time Input-to-State Stability of Impulsive Switched Systems