
Flight Time Minimization of UAV for Cooperative Data Collection in Probabilistic LoS Channel
2024-03-11 06:28:46YanLiShaoyiXuYunpuWuDongjiLi
China Communications 2024年2期
Yan Li ,Shaoyi Xu,* ,Yunpu Wu ,Dongji Li
1 School of Electronic and Information Engineering,Beijing Jiaotong University,Beijing 100044,China
2 School of Electrical Engineering and Electronic Information,Xihua University,Chengdu 610039,China
Abstract: This paper investigates the data collection in an unmanned aerial vehicle(UAV)-aided Internet of Things (IoT) network,where a UAV is dispatched to collect data from ground sensors in a practical and accurate probabilistic line-of-sight (LoS) channel.Especially,access points (APs) are introduced to collect data from some sensors in the unlicensed band to improve data collection efficiency.We formulate a mixed-integer non-convex optimization problem to minimize the UAV flight time by jointly designing the UAV 3D trajectory and sensors’scheduling,while ensuring the required amount of data can be collected under the limited UAV energy.To solve this nonconvex problem,we recast the objective problem into a tractable form.Then,the problem is further divided into several sub-problems to solve iteratively,and the successive convex approximation(SCA)scheme is applied to solve each non-convex subproblem.Finally,the bisection search is adopted to speed up the searching for the minimum UAV flight time.Simulation results verify that the UAV flight time can be shortened by the proposed method effectively.
Keywords: data collection;flight time;probabilistic line-of-sight channel;unlicensed band;unmanned aerial vehicle
I.INTRODUCTION
1.1 Motivation
Unmanned aerial vehicle(UAV)-assisted communication is considered as a promising technology due to its high mobility,flexible deployment,and high probability of establishing line-of-sight(LoS)communication links[1-3].An important application scenario of UAV-assisted communication is to collect data from distributed Internet of Things (IoT) sensors [2,4,5],especially in the post-disaster or with low quality of service(QoS)channel conditions.However,UAVs are typically battery-limited,which restricts the UAV flying time and the amount of data to be collected[6,7].The energy consumption of the UAV is different from traditional base stations(BSs)since the energy to keep the UAV hovering and moving is much larger than the communication part[8,9].Moreover,the UAV flight time is an important indicator to evaluate the network performance and the UAV’s serving efficiency.Therefore,minimizing the UAV flight time under limited energy is a promising research direction,especially in the post-disaster conditions.
The software-defined network (SDN) is seen as an emerging network paradigm to enable a unified control over network entities[10,11].It can facilitate flexible deployment and manage the complexity in the intersystem communication network to help reduce the cost[12].SDN operates by decoupling the control and data planes,which makes the controller optimally exploit the network resources from a global vision[11].In addition,integrating the existing network resources,such as the 5GHz unlicensed spectrum,can significantly boost the network spectrum efficiency.The UAVenabled network cooperative communication with the widely deployed WiFi Access Points (APs) through the SDN controller can make full use of wireless resources to obtain a better network experience.Thus,the SDN can be a promising technology to efficiently manage and improve the performance of the cooperative transmission in the UAV mobile network.
Motivated by the superiority of the UAV communication,we introduce an SDN-enabled UAV cooperative data collection network,where APs can facilitate the data collection to improve the UAV service efficiency.We aim to minimize the UAV flight time under the UAV energy budget,subject to the UAV speed constraints,the AP average throughput requirement,the data requirement in each IoT sensor,etc.
1.2 Related Works
A series of research works[13-16]studied the SDNenabled communication network to optimize the network throughput [13],delay [14,15],and energy efficiency [16].The OpenFlow protocol is commonly used for implementing the SDN-enabled UAV-assisted communication network[12,14]to optimize resource usage in a dynamic environment and allow easier control and implementation.In[13],the sum data rate of the coexisting software-defined cellular and the WiFi is maximized,and both the licensed spectrum and the unlicensed spectrum are adopted for LTE by using the carrier aggregation technique.In[14],the queuing delay is considered for an SDN-enabled UAV network to transmit data cooperatively with the WiFi system.Authors in[15]considered an SDN-enabled mobile edge computing server to coordinate the vehicular computation offloading time cost.Also,the authors in [16]proposed an energy-efficient architecture based on the SDN controller to optimize the throughput,delay,and energy consumption of the blockchain-enabled routing protocol.The AP-assisted SDN-enabled network can better use the spectrum resources and provide flexible inter-system management,and both the licensed and unlicensed spectrum are adopted to improve the UAV network performance and overcome the spectrum scarcity problem[17,18].
The energy consumption issue is a very important design aspect for the UAV-assisted communication since the UAV has limited onboard energy,which should be efficiently utilized such that the UAV’s endurance is prolonged [9,19-21].The propulsion energy consumption model of the rotary-wing UAV is proposed in [9].Based on this model,a series of works[19-21]studied the performance of the energy efficiency-related rotary-wing UAV network.The authors in[19]studied the energy efficiency and the capacity enhancement of a three-tier heterogeneous network.In [20],the energy efficiency of the UAV secrecy communication is maximized in enduring with the ground eavesdropper’s jamming signals.In [21],the energy efficiency of the mmWave-enabled nonorthogonal multiple access (NOMA)-UAV networks is maximized by optimizing the UAV placement,hybrid precoding,and power allocation jointly.Actually,the UAV flight time is a key factor in determining the UAV communication performance [22].In [22],the UAV flight time is divided into several equal time slots,and sensors upload their data to the UAV via uplink NOMA.To solve the UAV total flight time,the duration of each UAV slot time is minimized by jointly optimizing the UAV position,scheduling,and transmit power.However,this rewriting makes the constraints more stringent,which increases the difficulty of the algorithm convergence.Moreover,the limited energy is ignored when considering the time minimization.There are some studies consider both the UAV flying time and the limited onboard energy[23-29].In[23]and[24],the UAV energy consumption is minimized under the constraint of transmission time.In [25],the UAV can adopt solar energy to prolong its transmission time due to the limited UAV onboard energy.The energy consumption rate of the solarpowered UAV is minimized while optimizing the UAV routing,data rate,and transmit power.Authors in[26]studied how UAVs performed a virtual antenna array to communicate with remote BSs by using collaborative beamforming.Both the energy consumption and the transmission time need to be optimized.Authors in[27]considered the energy consumption constraints and maximized the UAV data collection throughput while ensuring the QoS and the time of the data collection.Moreover,the authors in[28]maximized the minimum UAV throughput for both orthogonal multiple access (OMA) and NOMA transmission,subject to the energy and time budgets at both the UAV and users.The UAV flying path is discretized into several equal path segments,while the total UAV flight time is the sum duration when the UAV remains in each path segment.As a result,the total UAV traveling distance needs to be determined when the path discretization method is adopted,which is still intractable.The author in[29]discretized the UAV total serving time into several unequal slots,and each duration of the time slot is optimized.However,this method might be inaccurate in practice since it is hard to ensure that the optimization result of the duration in each time slot is small enough to keep the channel unchanged.
In addition,studies in[19,21,27,28,30]only considered the LoS-dominant channel model in the rural area without high and dense obstacles,which might be inaccurate due to the shadowing effect or multipath reflection,especially in the urban or rural environment.The UAV-assisted communication on probabilistic LoS channel has been studied in[31-34].In[31],the altitude of the low-altitude aerial platforms is optimized to maximize the communication coverage.Based on this closed form of the LoS probability expression,[32] and [33] maximize the communication rate by optimizing the UAV position or flying trajectory in UAV anti-jamming and intelligent reflecting surface conditions,respectively.In [34],the authors built a probabilistic LoS channel model for a Manhattan-type city by using the combined simulation and data regression method,which is shown in the form of a generalized logistic function of the UAVsensor elevation angle.It can be more practical and accurate with this probabilistic LoS channel model for the urban environment.
1.3 Contributions
In this paper,we investigate an AP-assisted UAV data collection system under the UAV energy constraint to minimize the UAV flight time.The main contributions of this article are summarized as follows.
? An AP-assisted data collection structure is proposed to collect data from sensors in an SDNenabled cooperative transmission network to improve the network data collection efficiency.This AP-assisted scheme can reduce the number of sensors competing for the UAV-sensor channel.Hence,the UAV does not have to fly further to collect data from sensors,which saves much UAV energy and flight time.
? Based on the elevation angle-dependent probabilistic LoS channel model,we formulate the joint design of the association and the UAV 3D trajectory to minimize the UAV data collection time while ensuring constraints including the UAV maximum energy consumption,the minimum data requirement for each sensor,and the maximum UAV flying speed,etc.The formulated problem is a mixed-integer non-convex optimization problem,which is challenging to solve.
? To solve this problem,we first adopt a time discretization method to transfer the problem into a discrete form.Then,the time minimization problem is transformed into a tractable feasibility problem.After that,the block coordinate descent (BCD) technique is adopted to decompose the problem into several sub-problems and solve iteratively.A successive convex approximation (SCA) scheme is applied to solve each nonconvex subproblem.Finally,the bisection search is adopted to obtain the minimum flight time.
? We conduct extensive simulations to demonstrate that our proposed solution achieves significant performance gains over benchmark schemes in different energy constraints.
The remainder of this paper is organized as follows.Section II studies the system model and formulates an optimization problem to minimize the UAV flight time.Section III transforms the problem and proposes an efficient iterative-based algorithm to solve it.The simulation results are presented in Section IV.Finally,the conclusion is given in Section V.
II.SYSTEM MODEL AND FORMULATION
We consider an uplink transmission scenario with one UAV,Iground sensors,andKAPs as shown in Figure 1.The sets of the sensors and the APs are denoted asI={1,...,I}andK={1,...,K},respectively.The horizontal coordinate of sensors iswn.The number of information bits that needs to be collected from sensoriisSi.The horizontal coordinate of the UAV isq,and the altitude of the UAV isz.The UAV collects data from sensors in the licensed band,while the unlicensed band is adopted for the AP communication.An SDN server is equipped in the high altitude platform(HAP)(e.g.,aircraft,airships or balloons),which provides the wireless backhaul connectivity and control signals for the UAV.We consider the SDN with the separate control and data planes[14].The coordination and management of the data plane entities are completed by the OpenFlow protocol [12,35] in the control plane.In the data plane,the UAV and AP cooperatively collect data to improve the network serving efficiency.The total UAV flight timeTfcan be discretized intoMslots[17,36],andδtis the slot length withTf=δtM.The channel is approximately considered unchanged because each slot is short enough.We consider a two-layer data collection network structure here.Data in some sensors can first be collected by APs in the unlicensed spectrum in the first layer and then transmitted to the UAV in the second layer.In this way,the number of sensors competing for the channel can be reduced.Moreover,the UAV can collect data from APs and does not have to fly closer to sensors,which saves much UAV time and energy.
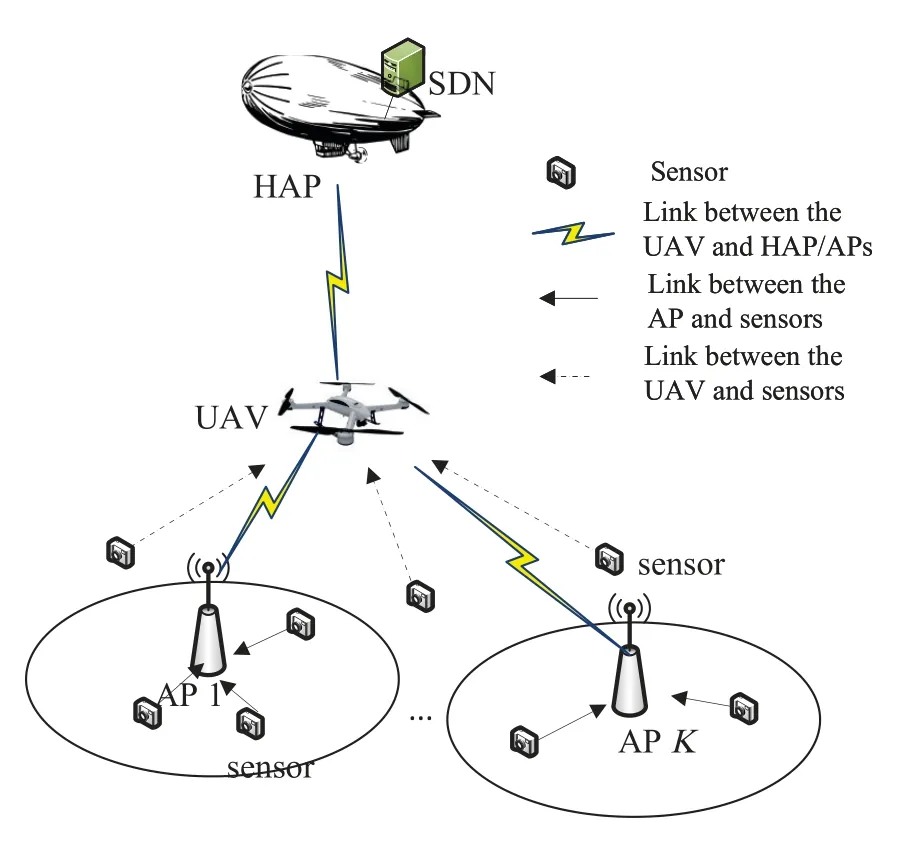
Figure 1.System model.
2.1 Data Collection in AP Layer
Firstly,we consider the data collection in the AP layer.In order to avoid interference to the UAV communication in the licensed band,sensors transmit data to APs in the unlicensed band in the first layer,which reduces the number of sensors competing for the UAV channel.According to[37],the traffic is mostly unsaturated in real networks.To make full use of unlicensed spectrum resources,sensors can compete and transmit data to APs in the wholeTfperiod.We define the APsensor association indicatorxi,kto indicate whether sensoriis offloaded to the APk,which can be denoted by
We assume there areJkstations competing for the unlicensed uplink channel within the APk’s coverage area.WiFi works under the saturated or the unsaturated traffic condition,and the back-off process is modeled by a two-dimensional Markov chain as in[37,38].Letτwdenote the channel access probability of each WiFi station,which can be written as
wherepwis the probability of the collision happening when a package is transmitted,Wwis the minimum contention window,andsstais the“maximum backoff stage”.The average data rate of the APkis[37,39]
wherePtr=1 -(1 -τw)Jkis the probability that there is at least one transmission,andPs=Jkτw(1-τw)Jk-1/Ptris the probability that the transmission is successful.TsandTcare the acerage time that the channel is sensed busy due to successful transmission and collision,respectively.
APs keep collecting and storing data from sensors within one UAV cruising periodTf,and then transmit the collected data to the UAV.The average throughput of the APkafter sensors’ offloading isTo gurantee the communication quality of APs,the number of sensors accessing to the AP needs to be limited to ensure that
2.2 UAV Data Collection
Then,we consider the UAV data collection process.For simplicity,we reorganize the subscript of APs/sensors asn,n ∈{1,...,N},when communicating with the UAV.We denote,?k.The total number of sensors and APs which directly transmit data to the UAV is
Works in[7,9,22]applied the simplified deterministic LoS channel for rural environment without obstacles with the fixed UAV flying altitude,which might be inaccurate for urban environment.In this paper,we adopt an elevation angle-dependent probabilistic LoS channel model[34],which can describe the air-toground channel more accurately since the LoS channel is unachievable in practice.The channel coefficient between the UAV and sensor/APncan be described as
whereβn[m] is the large-scale fading effects,and[m] is the small-scale fading,which is generally a complex-valued random variable with=1.For UAV-ground links,the large-scale fading is usually affected by the probabilities of LoS and non-LoS(NLoS)links,and it can be denoted by
whereβ0denotes the path loss at the reference distance of 1m [40] with the expression ofβ0=,fcdenotes the carrier frequency andcis the light speed.Also,αLandαNare the path-loss exponent for the LoS link and NLoS link,respectively,with 2<αL <αN,andκ <1 is the attenuation factor under the NLoS channel.The probability of LoSis given as in[31,34],that is
whereC1,C2,D1andD2are constant parameters which depend on the propagation environment and the distributions of the density/obstacles[41].This probabilistic LoS channel model for a Manhattan-type city is built by using the combined simulation and data regression method,which is shown in the form of a generalized logistic function of the UAV-sensor elevation angle[34,41].Furthermore,θn[m]is the elevation angle in degree between the UAV and AP/sensorn,that is
Then,the probability of NLoS between the UAV and sensors/APs at time slotmisPn,NLOS[m]=1 -Pn,LOS[m],and the expected channel gain is
wherepnis the transmit power of sensorn.The channelhn[m] is nonconvex and contains random variables.Rn[m] is also a random variable,which is challenging to be obtained.We defineA={an[m],?n}as the sensor/APnscheduling indicator,wherean[m]=1 indicates sensor/APnis scheduled by the UAV at time slotm;Otherwise,an[m]=0.We consider the energy-constrained UAV data collection scheme since the onboard energy of the UAV is limited.The propulsion energy consumption to support UAV movement is much larger than that for the communication.To improve the data collection rate of the UAV,assuming both APs and sensors transmit data at the maximum transmit power,namelyand.For a rotary-wing UAV,the horizontal flying speed of the UAV in time slotmcan be denoted by.According to [9],the horizontal propulsion power consumption depends on its horizontal flight speedvh[m],which can be modeled as
whereP0andPiare blade profile power and induced power in hovering status,respectively.Utip,v0,?,?,ρand ?Adenote the aerodynamic and aircraft design related constant parameters.Furthermore,the UAV power consumption in the vertical dirction during the time solotmisPz[m]=Wvz[m][42],whereWis the weight of the UAV,vz[m] is the UAV vertical velocity during the time slotmwith the expression ofThen,the UAV energy consumption in sensor/APnis
We setX={xi,k,?k,i}as the scheduling and association indicator between UAV sensoriand APk,A={an[m],?n,m}is the sensor/AP wake-up scheduling indicator set by the UAV,the UAV horizontal trajectory isQ={q[m],?m},and the UAV vertical coordinates isZ={z[m],?m}.To minimize UAV data collection time,we jointly optimize the UAV 3D trajectory and transmission scheduling of sensors/APs under the UAV energy constraint.The objective optimization problem is formulated as:
where (12a) indicates the required minimum amount of data collected by the UAV;(12b)and(12c)are association constraints between APs and sensors,while(12g) and (12h) are association constraints between the UAV and sensors/APs;(12d) is the minimum AP throughput requirement;(12e) gurantees the maximum UAV energy consumption;(12f) is the relaxed elecation angle constraint;Constraint(12k)limits the UAV vertical height;(12i),(12j)and(12l)restrict the UAV speed,the initial and final location,respectively.
However,problemP1is a mixed-integer nonconvex problem.Specifically,the objective optimization variableTfis closely related toM,which is the upper bound of the summarizing interval.To tackle this issue,we reformulate the objective problem into a tractable form firstly.Then,schedulingXis obtained by a proposed heuristic algorithm.After that,the UAV trajectoryQ,ZandAare optimized alternately with a givenM.Finally,the bisection search is applied to determine the feasibility of the optimization problem and obtain the minimum UAV flight time.
III.OPTIMIZATION PROBLEM SOLUTION
To transformP1into a tractable form,we introduce an slack auxiliary variablesμ,then(12a)can be recast as
We find thatμin (13) is the minimum ratio between the amount of data that the UAV collects from sensors/APs and the target amount of data to be collected.The optimalμ*in(13)is non-decreasing withM.Our goal is to find the minimumMto satisfy that all data can be uploaded,that isμ(M)≥1.M*inP1can be obtained by bisection search whenμ(M*)≥1 holds.Then,for a givenM,we can discuss the feasibility of the objective problem by jointly solvingX,A,QandZ.Therefore,problemP1can be reformulated as
However,P2is still a non-convex non-concave problem,which is an N-P hard problem.To solve this intractable problem,we divideP2into three subproblems,and the BCD algorithm is applied to solve variables alternatively.Firstly,we optimize the sensor/AP scheduling indicatorAwith fixed UAV trajectoryQandZ;Then,we optimizeQwith fixedAandZ;Next,Zis optimized with fixedAandQ.
The UAV-sensor association indicatorXneeds to be solved first.Assuming the AP data computing and the processing time is short enough that APs can be scheduled once receiving data from sensors.The AP cache is large enough,and sensors can transmit data to the AP during each round of the UAV serving period due to the communication between sensors and AP in the unlicensed band.The AP data collection rate can be estimated by(3).Specifically,the amount of sensors’data collected in AP should be no less than the sensors’transmiting need,that is
To encourage more sensors to offload data to the AP,we propose a heuristic-based AP-sensors association algorithm in Algorithm 1.APkchooses sensors and offloads data from a higher transmission rate until(15)cannot be satisfied.In this way,more data can be offloaded to the AP.

Upon solvingX={xi,k},we focus on the UAV data collection part from APs and sensors which directly communicate with the UAV.
3.1 Scheduling and Association Variables Optimization
In this subproblem,Ais the optimization variable whileQ,Z,andXare given.This problem can be written as
The major obstacle to solveP3is the binary constraint(12g) and (12h) are non-convexed.To overcome this obstacle,we rewrite constraint(12g)and(12h)as
where(17a)relaxesan[m]to be real value,and(17b)guarantees thatan[m] must be zero or one as in[17].After that,an iterative-based SCA technique is adopted to achieve the suboptimal solution ofP3.Specificaly,for a givenarn[m]andark[m]inr-th iteration,we have
After that,P4is a convex problem,and it can be solved by standard convex optimization tools,such as CVX.
3.2 UAV Horizontal Trajectory Optimization
Given any feasible communication schedulingA,X,and the vertical heightZ,the UAV horizontal trajectoryQ={q[m],?m}and elevation angleθncan be solved by the following problem:
However,P5is still non-convex due to the non-convex energy constraints in (12e) and (12f).The expected rate in(8)is the lower bounded of the
To solve the non-convexity of this problem,we first introduce the following theorem:
Theorem 1.is a convex function with respect to{1+exp[-(D1+D2θn[m])]}and{||q[m]-wn||2+z[m]2}when2<αL <4.Proof.See APPENDIX.
From Theorem 1,we can get the lower bound ofby using SCA technique through its first-order Taylor approximation as
Moreover,althrough the constraint in (12f) is nonconvex,the functionarctan(1/y)is convex fory >0.Then,θn[m]is convex with respect to||q[m]-wn||.Thus,the lower bound ofθn[m] can be given by its first-order Taylor expansion as
Similarity,we have the following inequality by applying the first-order Taylor expansion at the given pointq(l)[m],
After that,the approximate form ofP5can be written asP6as
Then,problemP6can be efficiently solved by the standard optimization tool CVX due to its convexity.
3.3 UAV Vertical Trajectory Optimization
Next,we optimize the UAV vertical trajectoryZwith fixed transmission schedulingAandX,and the UAV horizontal trajectoryQ.Then,problemP2is reduced to the following subproblem
Similar to the UAV horizontal trajectory optimization part in subsection 3.2,the SCA technique is adopted to transfer constraint (13) into a tractable form.Then,problemP7can be solved by solving the approximate form as:
Therefore,problemP8is a convex problem which can be solved by CVX.
3.4 Overall Algorithm
The minimum UAV serving time depends on the total number of slots during the flight,Mmaxis the maximum number of flight time slots,andMu[0]=Mmaxis a sufficiently large number,namely,the upper bound of the number of flight time slots.Ml(Ml <Mu) is the lower bound of the number of flight time slots,andMl[0]=0.The number of UAV serving time slots isM=(Mu+Ml)/2.The initial UAV trajectoryQ(0)is set as a circular in the considered serving area,and the schedulingA(0)is initialized by slovingP5whenM(0),X(0),Q(0)andZ(0)are given.The overall algorithm is summarized in Algorithm 2.

3.5 Convergence and Complexity
Based on the solutions to the sub-problems above,we alternately optimize the UAV trajectory and scheduling sub-problems based on the BCD method.Assumingνis the iteration number,letμ(Q(ν),θ(ν)) be the objective solution ofP5,and(Q(ν),θ(ν))be the objective value ofP6.Then,we have
where(a)holds since the first-order Taylor expansion in(20)and(21)are tight at the given local points[14,43],which indicates that problemP6at (Q(ν),θ(ν))has the same objective result as that of problemP5;(b)holds since for a givenA(ν),problemP6is solved optimally with solution(Q(ν+1),θ(ν+1)),and(c)holds since the objective value inP6is the lower bound to that ofP5.The inequality(27)indicates thatP5is nondecreasing after each iteration.Similarly,we have
Based on(27),(28)and(29),we obtain the following inequality
which shows that the objective of problemP2is nondecreasing after each iteration,and the maximum objective value ofμis upper bounded by the total slot numberM.Therefore,the SCA-based alternative solutionA,QandZare guaranteed to converge to a locally optimal solution.In addition,the number of total time slots is discrete and finite,and it would definitely converge to a stable value after the iteration.Therefore,Algorithm 2 can converge in polynomial time.
The complexity of Algorithm 2 mainly depends on the complexity of the bisection and the the step 4 in Algorithm 2.The complexity for solvingP7isO(L1(M+MN)3.5)[43,44],whereM+MNrepresents the total number of variables,andL1denotes the number of iterations required to update the UAV trajectory and the elevation angle.Similarly,the complexity for solving sub-problemP5isO(L2(MN)3.5),whereL2is the number of iterations required to update the sensors/APs scheduling.Therefore,the overall complexity of Algorithm 2 isO(L2(MN)3.5+L1(M+MN)3.5+log(M)),whereO(log(M)) is the complexity of the bisection algorithm to update the required number of slots.
IV.SIMULATION
In our setting,28 sensors are randomly distributed within 2000 × 2000m2.Parameters for the probabilistic LoS channel are set asC1=-0.63,C2=1.63,D1=-0.4568,D2=0.047,αL=2.5 andκ=-20 dB [34].The carrier center frequency of the licensed bandfcis 2 GHz,and the carrier center frequency of the unlicensed band is 5.8 GHz.Other simulation parameters are set up in Table 1.In the following part,we simulate and compare the UAV flying trajectory,the flying speed,and the minimum flight time in the proposed strategy,the fixed UAV altitude scheme,and“probabilistic LoS channel-based flyingwhile-communication mode (PL-based Fmode)” [36]under different energy constraints and sensors’distributions.In the fixed UAV altitude scheme,we only optimize the UAV horizontal trajectory and the scheduling of sensors/APs.In“PL-based Fmode”,data is directly collected by the UAV without APs’ auxiliary,and the UAV collects data while flying.Actually,the literature [34] also adopt “PL-based Fmode”,if the UAV energy constraint is ignored.After that,we compare the UAV trajectory and the minimum flight time in the proposed scheme,“PL-based Fmode”,“Hovering-communication mode (Hmode)” [9],and“Two-layer collection” scheme [17] under differentnumbers of sensors and APs.In the“Hmode”scheme,the UAV sequentially hovers above sensors/APs while collecting data.The UAV would not communicate with sensors/APs when it flies from one point to the next point at the maximum flying speed.Moreover,in the“Two-layer collection”scheme,all data from sensors is first collected by the APs in the first layer and then transmitted to the UAV in the second layer.For the fairness of comparison,we assume there are many APs in the serving area,and onlyKAPs are activated in each round of the data collection by the UAV in the“Two-layer collection”scheme.

Table 1.Simulation parameter settings.
4.1 UAV Performance Under Different Energy Constraints
Figure 2 compares the UAV horizontal trajectory in“PL-based Fmode” and the proposed scheme under different energy constraints.It is observed that more energy can support the UAV to fly closer to sensors/APs,and obtain a higher data rate.In this way,the UAV data collection time can be shortened.Figure 3 illustrates the minimum UAV flight time corresponding to Figure 2.It can be seen that the proposed strategy can shorten the UAV flight time due to the APs’auxiliary.Compared with the“PL-based Fmode”,APs in the proposed scheme can transmit at higher power,which leads to a higher data rate.Moreover,compared with the fixed UAV altitude scheme,the proposed 3D trajectory optimization scheme can further shorten the UAV serving time.Therefore,the achievable flight time in Figure(2b)(proposed scheme)is shorter than that in Figure (2a) (PL-based Fmode).Furthermore,the number of sensors is decreased with the help of APs,which reduces the number of sensors competing in the channel.Figure 4 plots the UAV 3D trajectory in the proposed,PL-based Fmode and the fixed UAV altitude schemes.It can be seen that the adjustable UAV vertical coordinates make the UAV more flexible when serving the ground sensors.Also,compared with the PL-based scheme,the energy can support the UAV fly higher with the APs’auxiliary in the proposed method.

Figure 2.UAV horizontal trajectory vs. different energy constraints.

Figure 3.The UAV minimum serving time vs. different energy constraints.
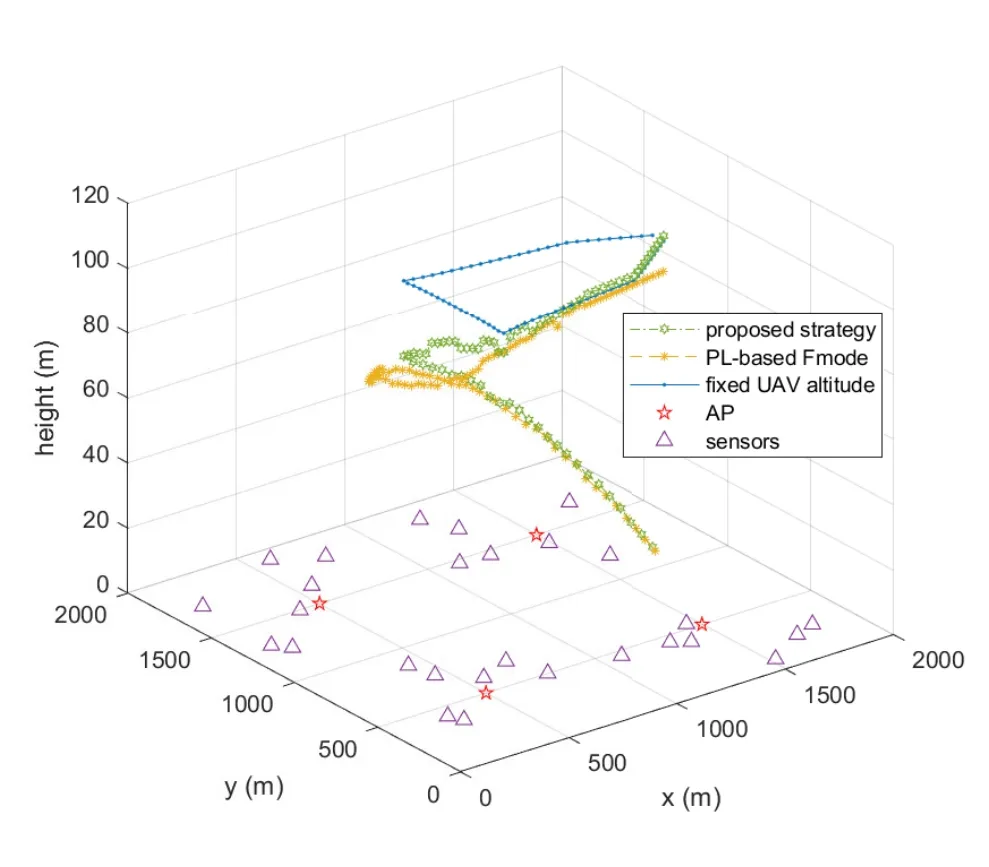
Figure 4.UAV 3D trajectory in different schemes.

Figure 5.3D trajectory under different energy constraints.
The UAV 3D trajectory of the proposed scheme is illustrates in Figure 5,where the horizontal trajectory are shown in Figure(2b).The UAV can adjust its altitude and fly closer to sensors to achieve a higher data rate with more energy,which shortens the UAV’s serving time.Also,Figure 6 plots the UAV flying speed versus time in the proposed scheme and “PL-based Fmode” under the energy constraintE0=60KJ andE0=80KJ,respectively.We observe that the UAV flying speed in the proposed scheme is lower than that of “PL-based Fmode”.This is because the UAV flying distance in the proposed scheme is shorter than in“PL-based Fmode”,and the UAV does not need to fly closer to some sensors to collect data.Furthermore,the UAV’s flying speed increases with the UAV energy increases since it can fly closer to sensors/APs to increase its data rate.

Figure 6.The UAV speed versus time under different energy constraints.
Figure 7 plots the UAV trajectory when the amount of data in sensors are distributed in the “evenly” and“unevenly”conditions,respectively.The energy constraint is fixed with 80KJ.In the“evenly”distribution,the amount of data to be transmitted in each sensor is 10Mbits (15Mbits).In the “unevenly” condition,the required amount of data in the left and right part of the serving area is different.The amount of data to be transmitted is 12Mbits for the sensor whose xcoordinate is less than or equal to 1000m,while the amount of data to be transmitted is 8Mbits for the sensor whose x-coordinate is larger than 1000m.We can see that the UAV trajectory would bias towards sensors with more data.Once the amount of data increases,the UAV needs to fly closer to sensors with more data.

Figure 7.UAV trajectory under different amount of data in sensors.
4.2 UAV Trajectory and Minimum Serving Time Under Different Serving Strategies
Figure 8 compares the UAV trajectory under different data collection strategies when the number of sensors in the whole serving area is 28.In the“Hmode”scheme,the UAV successively visits a set of hovering points and collects data only when hovering above each sensor.After visiting all sensors,the UAV flies back to its initial point.This scheme is lowcomplexity but suboptimal since the UAV flying distance is the longest and the data collection efficiency is the lowest.For the“Two-layer collection”scheme,all data should be collected by the APs firstly,and then APs transmit the collected data to the UAV in a time division method.In the first layer of this scheme,the amount of data collected by the APs is restricted by the AP’s coverage and the minimum AP throughput requirement in(12d).Since APs cannot cover all sensors in one round of the transmission,the UAV has to fly several rounds to complete the data collection.As shown in the red UAV trajectory of Figure 8,the UAV flies twice to finish the data collection in this setting.In addition,the UAV flying distance in “PLbased Fmode”is also longer than the proposed scheme under the same energy constraint (80KJ).The UAV minimum flying time versus the number of sensors in four schemes is depicted in Figure 9.As the number of sensors increases,the minimum UAV flight time also increases.Increasing the number of sensors means that more data needs to be collected,and the UAV needs to fly further and consume more time to collect data.The increasing speed of the minimum UAV serving time in the “Two-layer collection” scheme is the highest because data can be collected by APs for one round of the transmission when the number of sensors is small.With the increasing number of sensors,the UAV needs to fly several rounds to complete the data collection.

Figure 8.The UAV trajectory in different strategies.
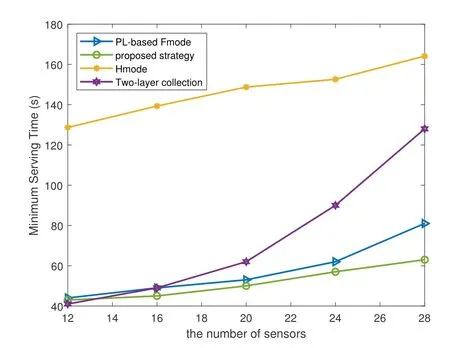
Figure 9.Minimum UAV flight time vs. the number of sensors.
V.CONCLUSION
This paper proposes an AP-assisted UAV data collection scheme under the UAV energy constraint to minimize the UAV flight time.Firstly,data in some sensors is collected by APs in the unlicensed band to avoid interference to the UAV.After that,a flight time minimization problem for the UAV data collection in the probabilistic LoS channel is formulated,which is a non-convex problem.The time discretization is adopted to convert the original problem into a tractable form.Then,we transform the time minimization problem into a feasibility problem of the ratio of data volume.After that,BCD and SCA methods are applied to optimize the UAV 3D trajectory and sensors/APs scheduling alternately.Finally,the UAV flight time is obtained by the bisection search.
ACKNOWLEDGEMENT
This work was supported by the National Key Research and Development Program under Grant 2022YFB3303702 and the Key Program of National Natural Science Foundation of China under Grant 61931001.The work of Yunpu Wu is supported by the National Natural Science Foundation of China under Grant No.62203368,and the Natural Science Foundation of Sichuan Province under Grant No.2023NSFSC1440.
Figure 10 shows the UAV minimum flight time versus the number of APs in the network.When the number of APs is less than 4,the UAV cannot complete the data collection from all sensors in“Two-layer collection” scheme.We simulate the optimal AP distribution to cover as many sensors as possible.It can be observed that the minimum UAV flying time decreases rapidly with the number of APs increases.Therefore,the“Two-layer collection”scheme is suitable for conditions with more APs.Compared with the“Two-layer collection”scheme,the proposed scheme is more flexible since it can collect data from both APs and sensors directly.Moreover,the UAV flying time decreases with the larger APs’ coverage area in both schemes since APs can collect more data.

Figure 10.Minimum UAV flight time vs. APs’coverage.
APPENDIX
After that,we prove the Hessian of ▽2g(y,z)is a positive definite matrix by|▽2g(y,z)|>0.The determinant of ▽2g(y,z)is
where the first inequality holds since lnforx >0.Since 2<αL <4,x >0,y >0,C2>0,andC1+C2=1,we can get|▽2g(y,z)|>0 in(A.7).Then,the Hessian ofg(y,z) is positive definite andg(y,z) is a convex function with respect toyandz.Therefore,[m]is a convex function with respect to{1+exp[-(D1+D2θn[m])]}and{||q[m]-wn||2+H2}.

- China Communications的其它文章
- An Efficient Approach to Escalate the Speed of Training Convolution Neural Networks
- Reliability Assessment of a New General Matching Composed Network
- Cooperative User-Scheduling and Resource Allocation Optimization for Intelligent Reflecting Surface Enhanced LEO Satellite Communication
- Joint Optimization of Resource Allocation and Trajectory Based on User Trajectory for UAV-Assisted Backscatter Communication System
- Cooperative Anti-Jamming and Interference Mitigation for UAV Networks: A Local Altruistic Game Approach
- A Novel Multi-Stream Fusion Network for Underwater Image Enhancement